|
Function
|
ACS UDMnt driver module, with connectors for positioners from PI
|
|
|
|
Design
|
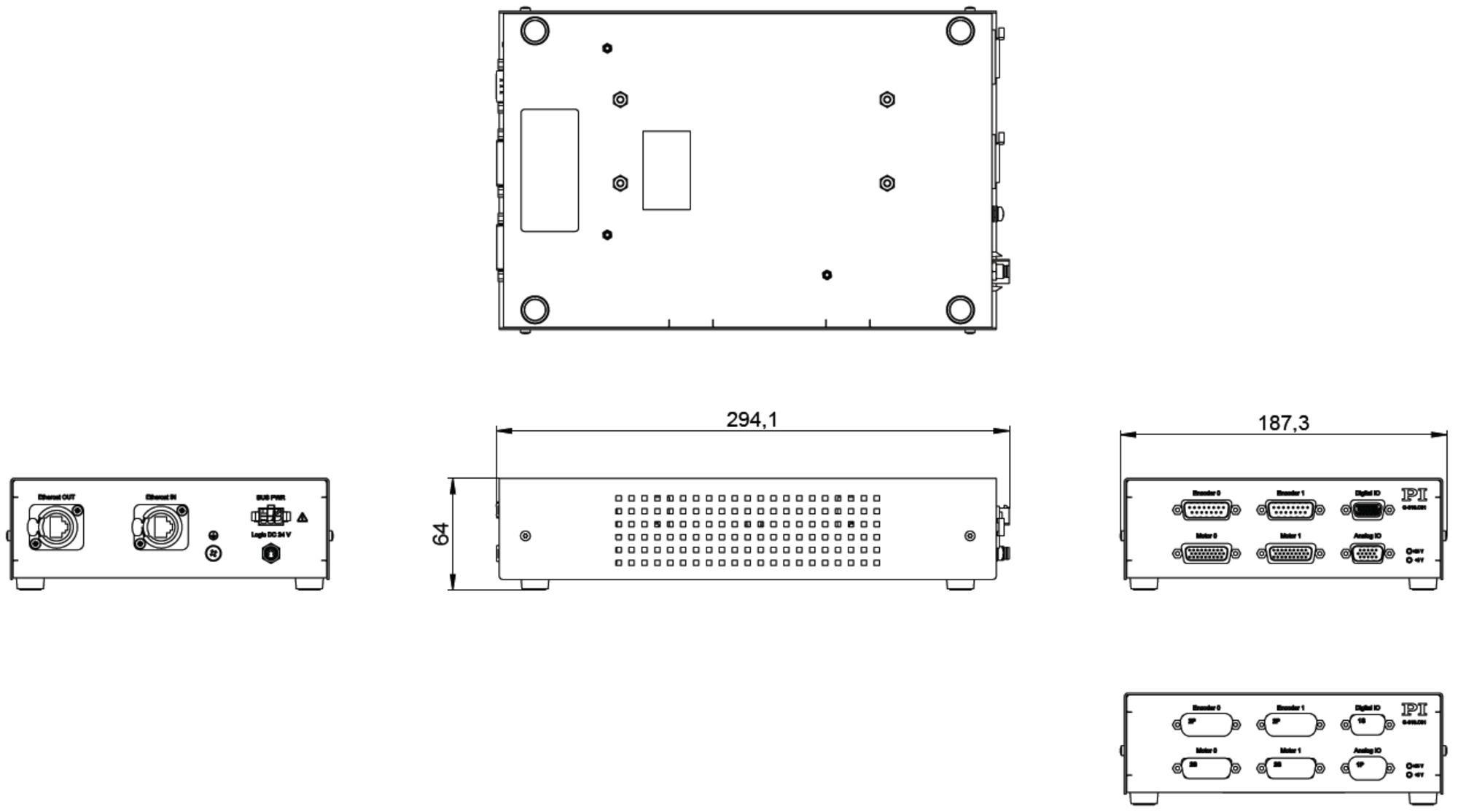
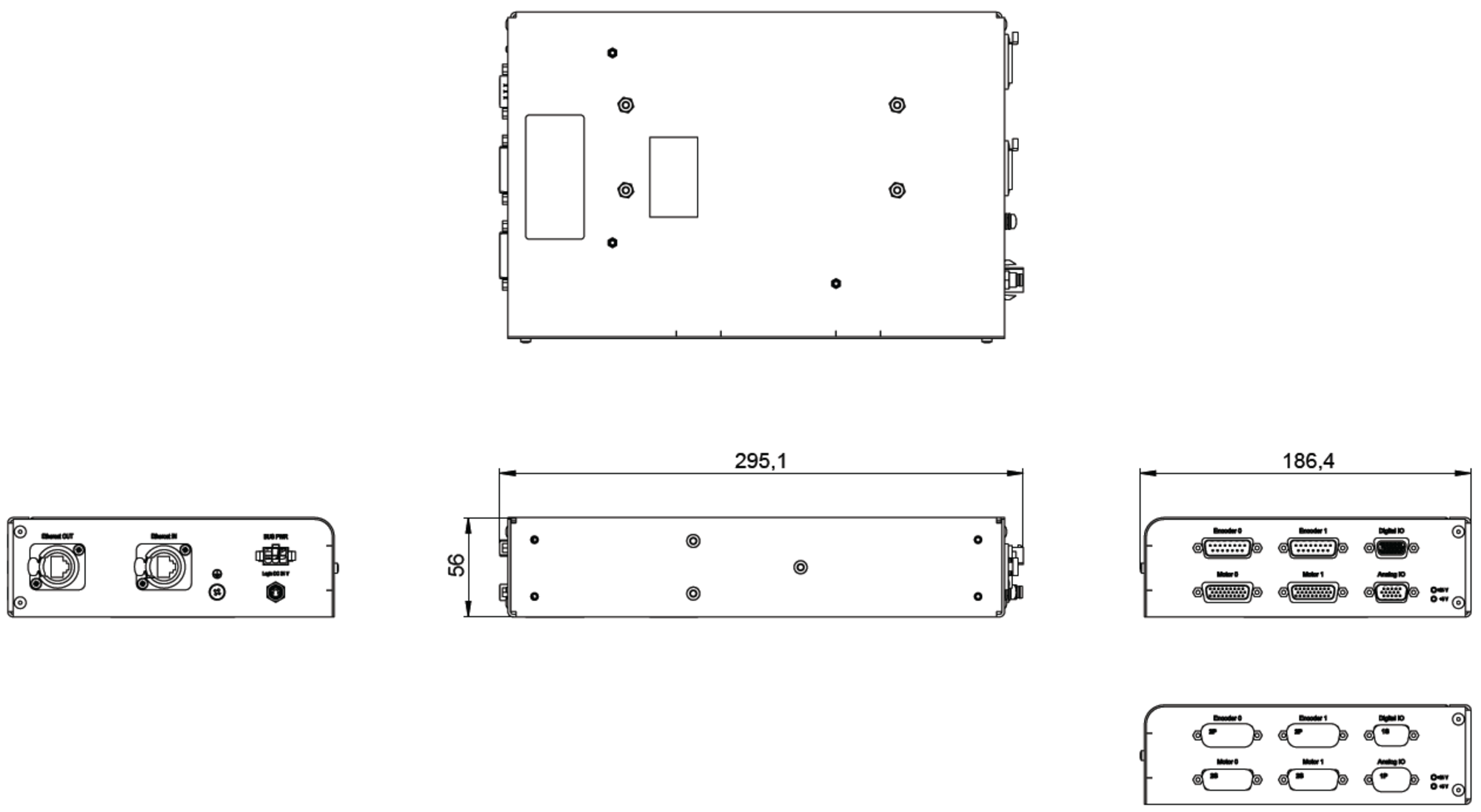
G-910.RC01xxxxx: Benchtop deviceG-910.RC03xxxxx: Control cabinet module
|
|
|
|
Motor types
|
2-phase and 3-phase AC servo motors / brushless DC motors, brushed DC motors, voice coil motors, stepper motors
|
|
|
|
Number of drive axes
|
2
|
|
|
|
Motion and control
|
G-910.RC0102100 / G-910.RC0102200 / G-910.RC0302200
|
|
|
|
Controller type
|
Cascaded PIV controller structure with velocity and acceleration feedforward control
|
|
|
|
Sampling rate current control
|
20 kHz
|
|
|
|
Control algorithms
|
Gantry control, dual-loop control
|
|
|
|
Encoder
|
1 × per axis, supported types:Incremental: 1Vss, RS-422Absolute: EnDat 2.2 & 2.1, Smart-Abs, Panasonic, BiSS-A/B/C (SSI)
|
|
|
|
Limit switch
|
2 × per axisStandard: 5 V sinking (NPN)Optional configuration: 24 V; sourcing (PNP)
|
|
|
|
Reference switch
|
Default: 1 × per axis, 5 V sinking (NPN)Optional configuration: 24 V; sourcing (PNP); use as digital multipurpose inputs on HD-D-sub 15 (f)
|
|
|
|
Motor brake
|
1 × per axisIntegrated PWM brake driver with current reduction for reduced brake heating
|
|
|
|
Electrical properties
|
G-910.RC0102100
|
G-910.RC0102200
|
G-910.RC0302200
|
|
Output voltage (intermediate circuit)*
|
24 V
|
48 V
|
12 V to 60 V
|
|
Max. output power (intermediate circuit)*
|
120 W per axis
|
280 W per axis
|
480 W per axis (at 60 V DC, 8 A input current)
|
|
Current limitation per motor phase (amplitude sinus), continuous/peak (max. 1 s)
|
5 A / 9.5 A peak**
|
5 A / 9.5 A peak**
|
5 A continuous / 10 A peak
|
|
Interfaces and operation
|
G-910.RC0102100 / G-910.RC0102200 / G-910.RC0302200
|
|
|
|
Motor connector
|
2 × HD D-sub 26 (f)
|
|
|
|
Sensor connector
|
2 × D-sub 15 (m) or 2 × via the motor connectorsFactory default configuration on delivery:Digital incremental encoder (RS-422) or absolute encoder on motor connectorIncremental encoder 1 Vss on D-sub 15 (m)Factory default configuration on delivery:Digital incremental encoder (RS-422) or absolute encoder on D-sub 15 (m)
|
|
|
|
Digital I/O lines
|
HD D-sub 15 (f):2 × outputs PNP 24 V source; also control the brake drivers at the motor connectorsDefault for inputs:2 × PNP 24 V source on HD D-sub 15 (f); in addition 2 × NPN 5 V sinking for reference switches on the motor connectorsOptional configuration for inputs:4 × PNP 24 V source on HD D-sub 15 (f)
|
|
|
|
Analog I/O lines
|
HD D-sub 15 (m):2 differential analog inputs: ±10 V, 12 bit1 differential analog output: ±10 V, 10 bit
|
|
|
|
Outputs for position event generator (PEG)
|
Parallel on HD D-sub 15 (m) and HD D-sub 15 (f):2 differential outputs (RS-422) for pulses at programmable positions, pulse width 26 ns to 1.75 ms, max. 10 MHz; only possible with incremental encoder
|
|
|
|
Communication interfaces
|
EtherCAT
|
|
|
|
Environment
|
G-910.RC0102100
|
G-910.RC0102200
|
G-910.RC0302200
|
|
Operating voltage intermediate circuit
|
24 V DC from external power supply unit, power supply unit with 24 V DC (120 W) included in the scope of delivery
|
48 V DC from external power supply unit, power supply unit with 48 V DC (280 W) included in the scope of delivery
|
12 V to 60 V DC from external power adapter, not included in the scope of delivery
|
|
Operating voltage logic
|
24 V DC from external power supply unit, power supply unit with 24 V DC (120 W) included in the scope of delivery
|
24 V DC from external power supply unit, power supply unit with 24 V DC (120 W) included in the scope of delivery
|
24 V DC from external power supply unit, not included in the scope of delivery
|
|
Max. current consumption intermediate circuit
|
5 A*
|
5 A*
| <8.6 A
|
|
Max. current consumption logic
|
0.9 A
|
0.9 A
|
0.9 A
|
|
Operating temperature range
|
5 °C to 40 °C (temperature protection switches off at excessively high temperatures)
|
5 °C to 40 °C (temperature protection switches off at excessively high temperatures)
|
5 °C to 40 °C (temperature protection switches off at excessively high temperatures)
|
|
GND
|
1.55 kg
|
1.55 kg
|
1.4 kg
|
|
Dimensions
|
187.3 mm × 64 mm × 294.1 mm
|
187.3 mm × 64 mm × 294.1 mm
|
186.4 mm × 56 mm × 295.2 mm
|