I dispositivi quali i motori voice coil, lineari o torque sono azionamenti elettromagnetici diretti. Negli azionamenti diretti, la forza dell'elemento di azionamento viene trasmessa direttamente al carico da spostare (es. a una tavola lineare o rotante, senza elementi di trasmissione meccanica quali giunti, viti di azionamento o riduttori). Gli azionamenti elettromagnetici diretti consistono in uncorpo di avvolgimento (bobina) in cui, quando la corrente lo attraversa si forma un campo magnetico, e da un supporto o gruppo magnetico su cui sono montati i magneti.
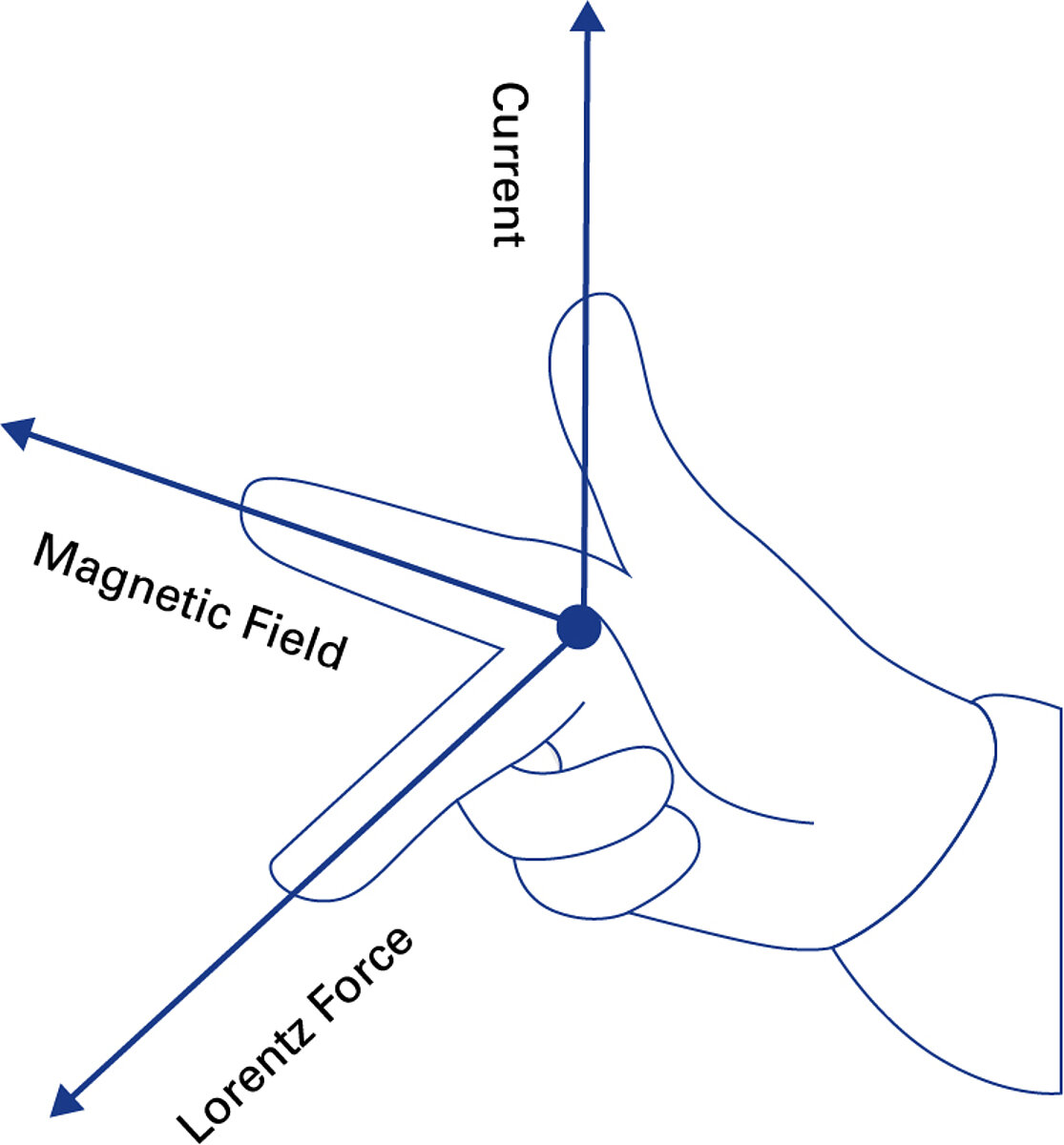
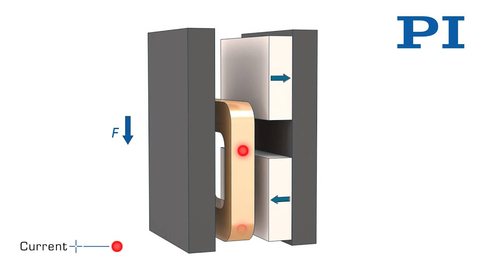
La forza o la torsione per l'accelerazione del carico è generata dalla forza di Lorentz. Questa forza è proporzionale all'intensità del campo magnetico e alla corrente che passa attraverso il conduttore. L'energia elettrica viene qui convertita in energia meccanica. Le forze generate agiscono bidirezionalmente a seconda della direzione della corrente. In linea di principio, sia il corpo dell'avvolgimento ("moving coil") che il gruppo magnetico ("moving magnet") possono essere spostati. La parte mobile viene definita come parte secondaria, la parte statica come parte primaria.
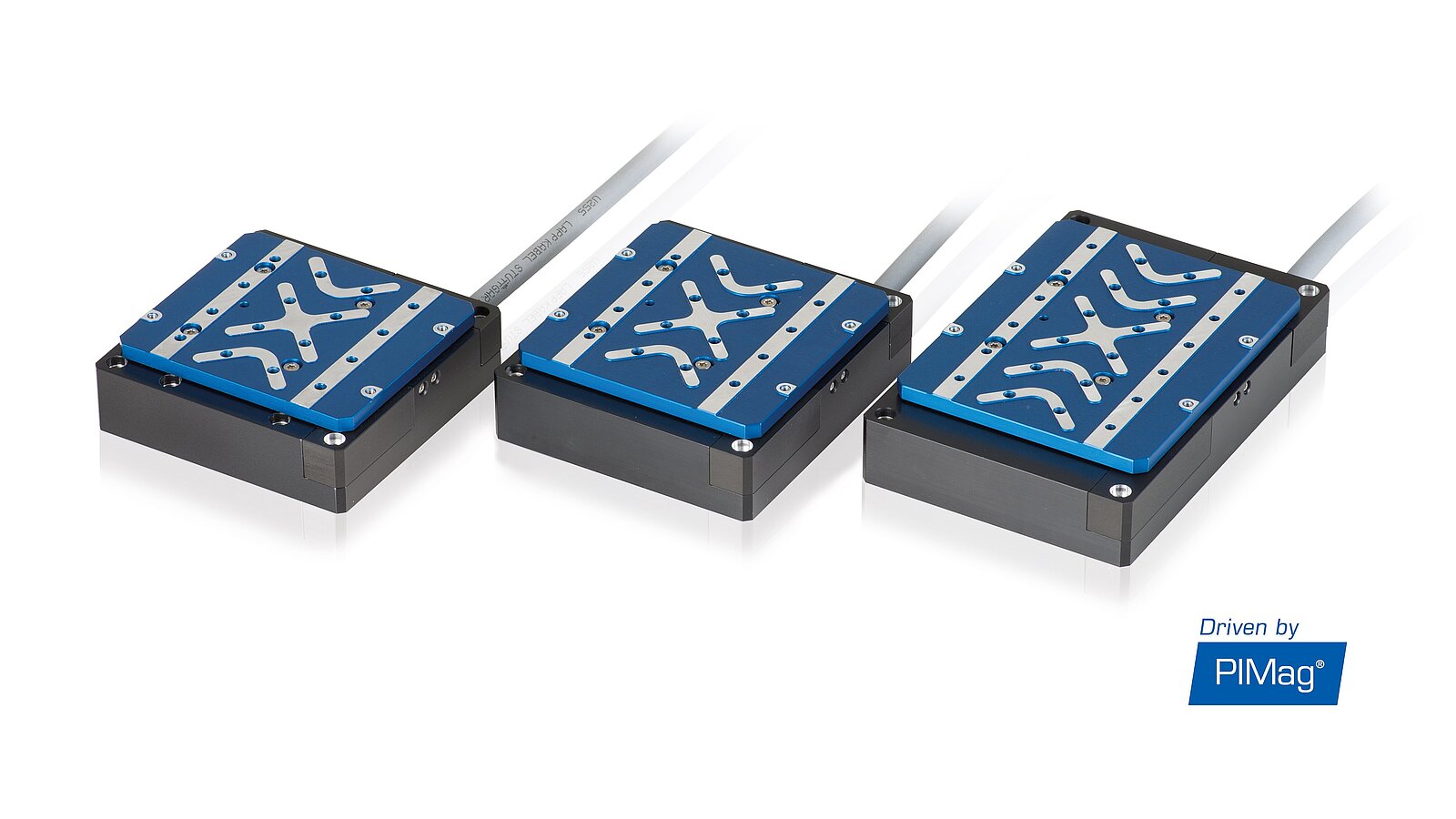
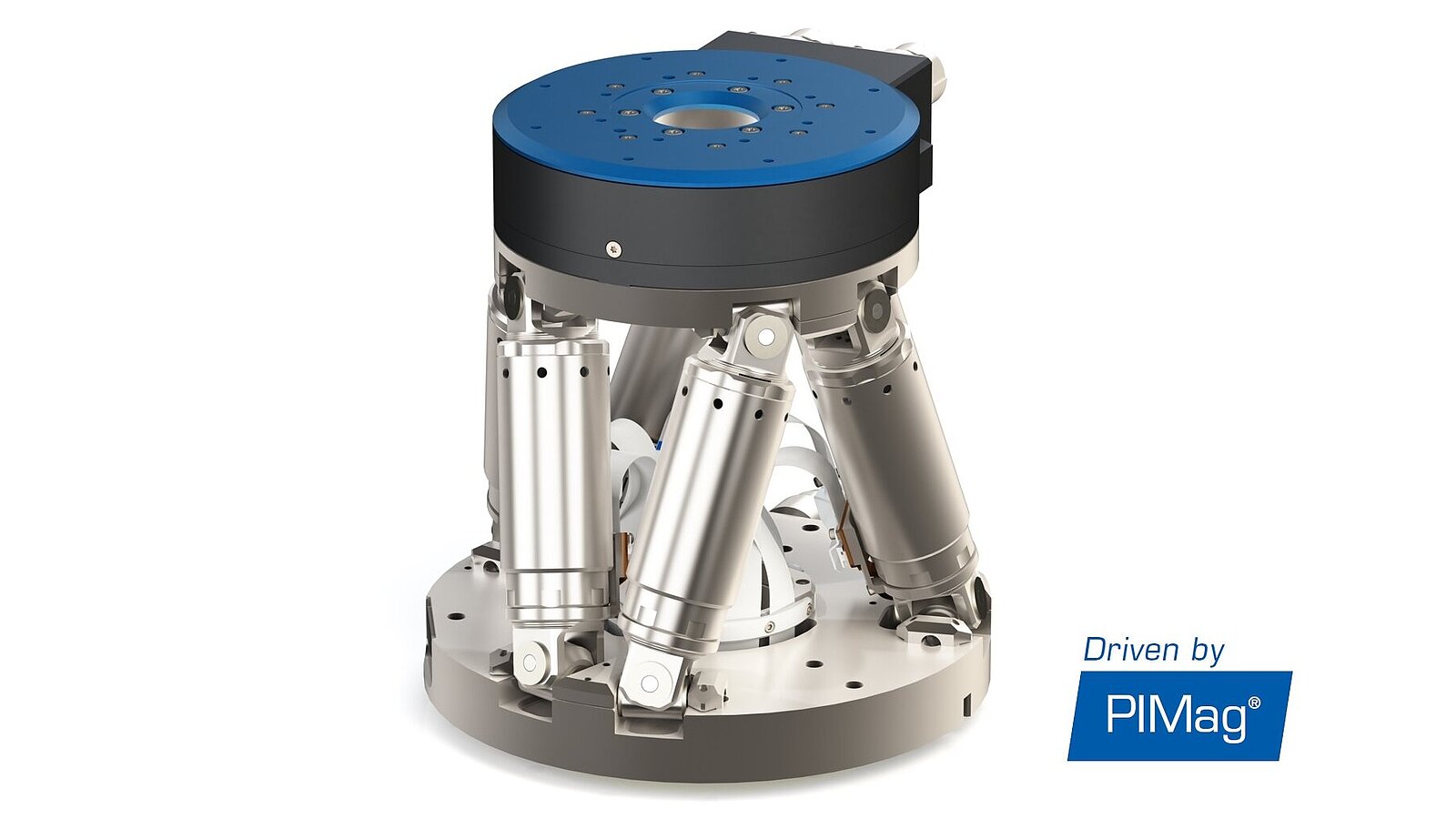
PI offre diverse soluzioni di posizionamento standard o su specifica del cliente, dotate di azionamenti magnetici diretti; l'azienda vanta inoltre una pluriennale esperienza nella progettazione, costruzione e produzione dei componenti dei sistemi necessari, quali guide, sensori, tecnologia di controllo e software. PI può anche sviluppare motori magnetici proprietari, nel caso in cui i sistemi di posizionamento debbano rispondere a specifiche caratteristiche prestazionali che non possono essere raggiunte utilizzando componenti di azionamento attualmente disponibili sul mercato, ad esempio, per ottenere un'elevata densità di forza o un design compatto. Questi motori proprietari, sviluppati internamente, sono identificati tramite il marchio di fabbrica PIMag® e i sistemi di posizionamento che utilizzano questi motori PI sono identificati dal logo Driven by PIMag®.
Motori Voice Coil
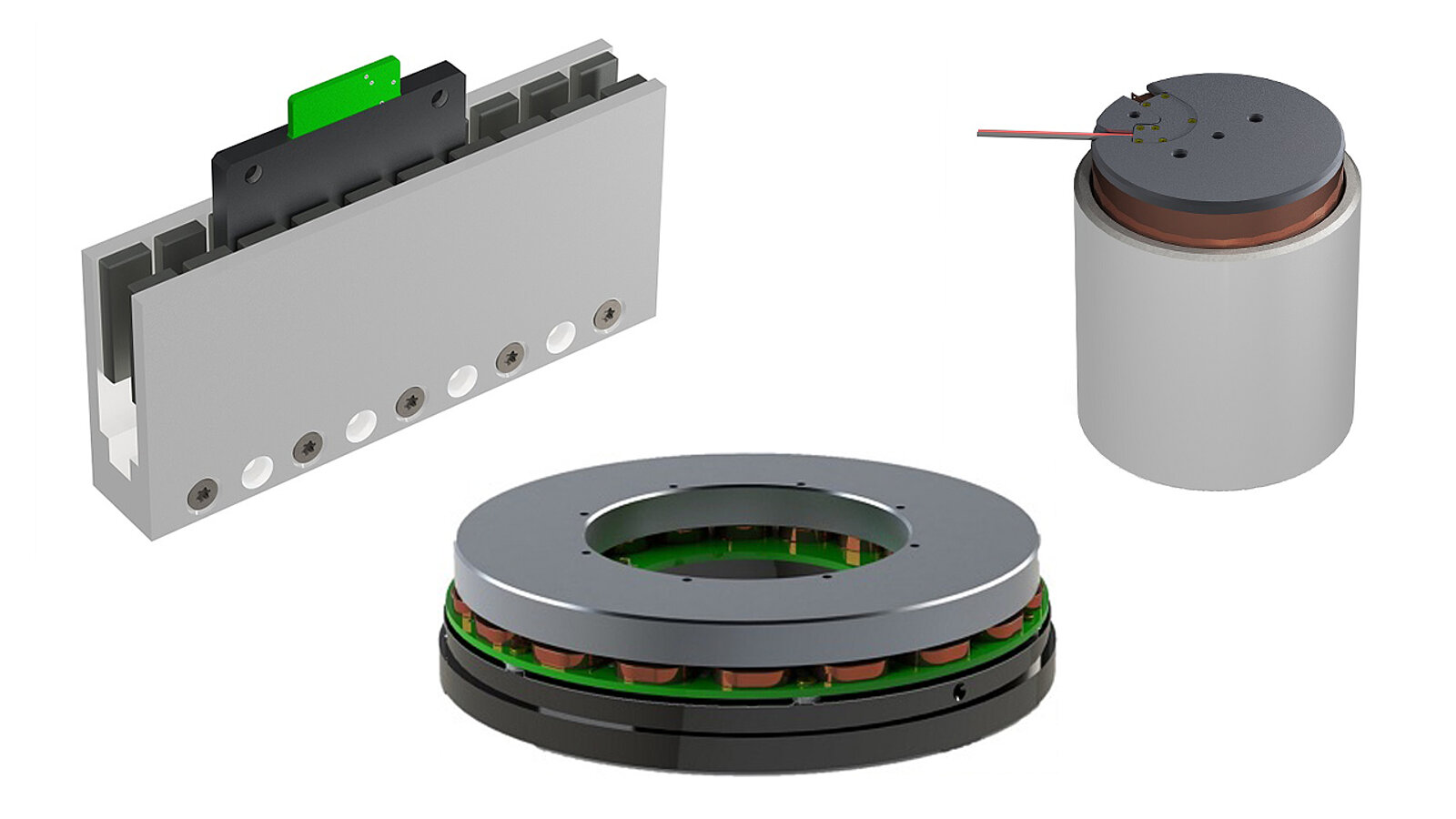
I dispositivi Voice coil sono motori a singola fase che consistono in un magnete permanente e un corpo di avvolgimento che si trovano nel traferro del campo magnetico. Quando la corrente fluisce attraverso il corpo di avvolgimento, si muove nel campo magnetico del magnete permanente. Dimensioni particolarmente compatte possono essere ottenute quando si costruiscono forme rettangolari o piane.
Voice coils cilindrici sono costruiti secondo il principio della bobina a pistone (la bobina si trova in un gruppo di campo). Sia il corpo di avvolgimento che il gruppo di campo possono essere mossi. Grazie al cosiddetto principio multi-coil, la costante motore del motore voice coil cilindrico può essere ottimizzato in spazi di installazione compatti e possono essere realizzate, per esempio, soluzioni con alberi cavi. I dispositivi voice coil sono particolarmente indicati per applicazioni di scansione che richiedono elevata precisione, elevata dinamica, e alte velocità con corse fino a dieci millimetri.
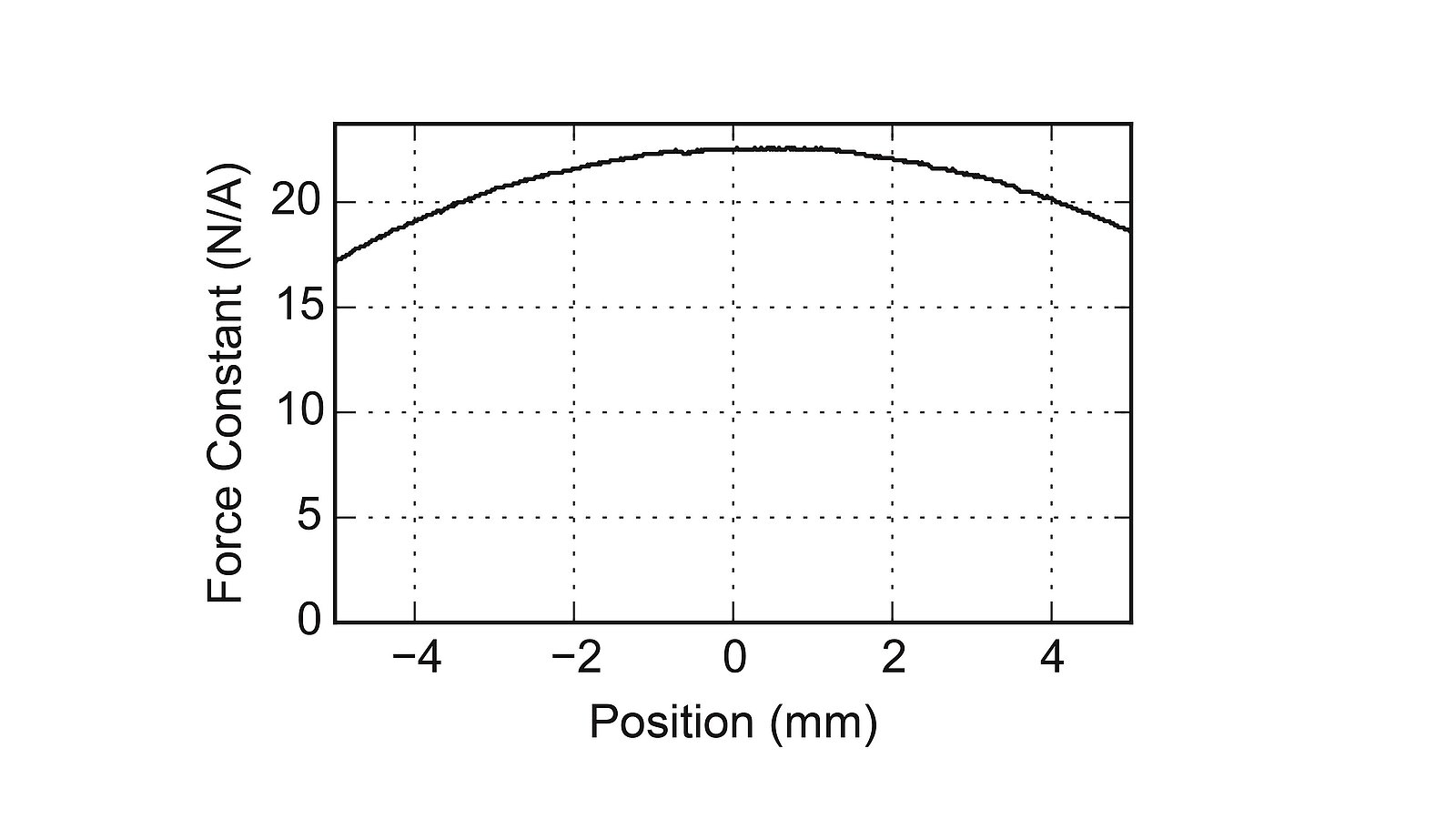
I voice coils possono essere inoltre ottimizzati in forza o costante motore. La costante motore denota il rapporto tra forza e perdita di potenza. Più alta è la costante motore, meno calore viene prodotto quando viene generata una forza. Esso descrive l'efficienza del motorerispetto alla conversione dell'energia elettrica in energia cinetica. Come aumenta la temperatura, la resistenza di avvolgimento e quindi anche la perdita di potenza aumentano, questo è il motivo per cui la costante motore dipende dalla temperatura.
La forza dipende dalla posizione in quanto le bobine si muovono in relazione al magnete permanente lungo la corsa. Al fine di spingere il più velocemente possibile la forza nel motore, è possibile aumentare la tensione, in quanto al corrente viene resa disponibile più velocemente. L'accelerazione aumenta a parità di rapporto. Applicazioni in elevata dinamica sono quindi possibili attraverso un rapido aumento dell'accelerazione (jerk). I motori cilindrici vengono utilizzati, per esempio, in soluzioni di posizionamento per attività di messa a fuoco al fine di muovere in maniera dinamica una testa di misura oppure un sistema ottico verticale o in endoscopia.


Motori Lineari

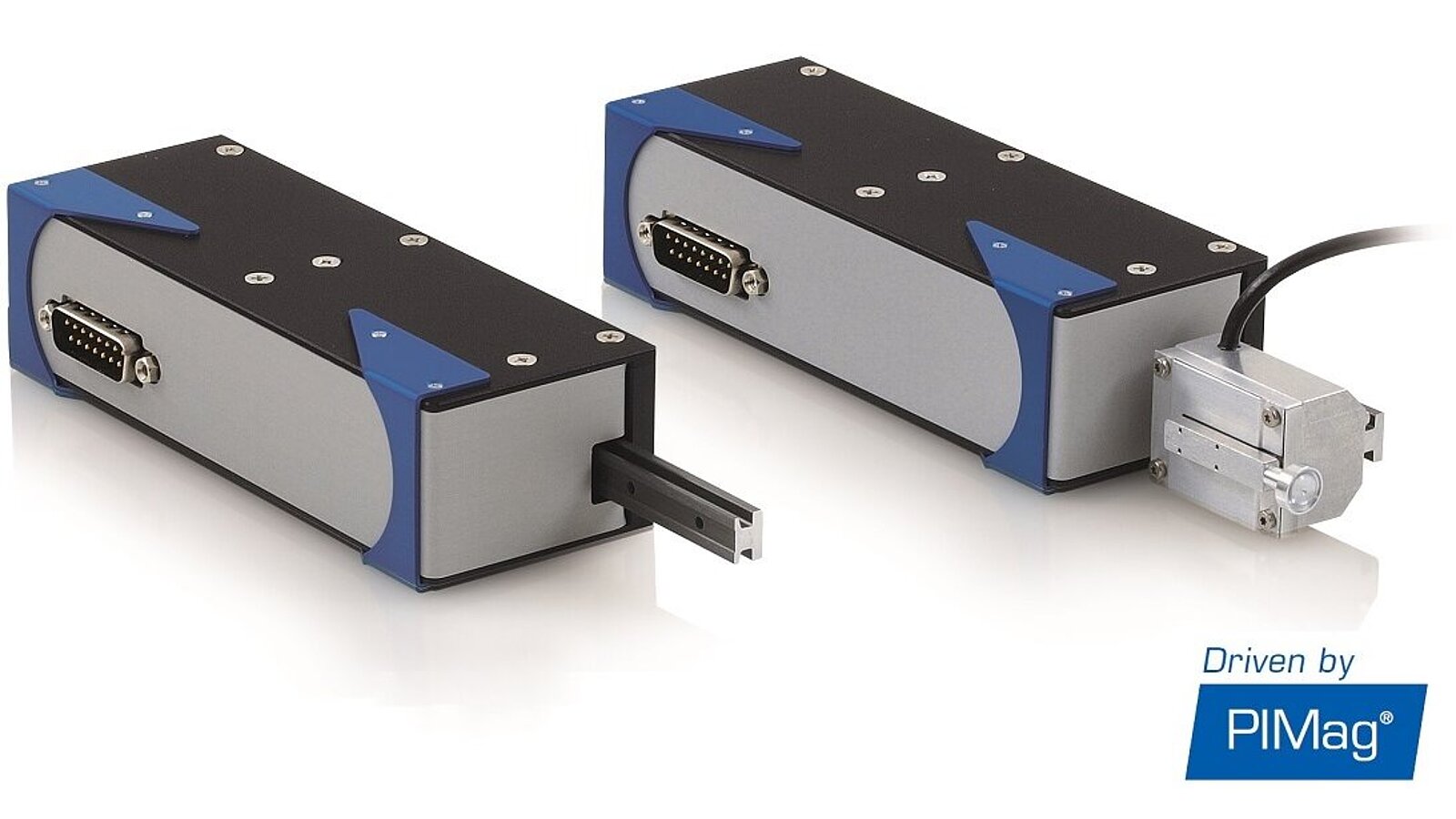
Un classico motore lineare a 3 fasi è fondamentalmente una serie di almeno tre (o multiplo di tre) motori voice coil. Le singole bobine possono essere controllate in base a uno schema fisso, dipendente dalla posizione (commutato). I motori lineari vengono utilizzati sia per velocità di avanzamento molto alte che molto basse. Esse lavorano in modo molto preciso in una gamma che parte da un valore al di sotto di 0.1 µm/s fino a oltre 5 m/s. Se combinati con cuscinetti ad aria o magnetici, è possibile ottenere una risoluzione di posizionamento fino a pochi nanometri.
A scelta del cliente, sotto vuoto, PI può utilizzare sui suoi motori lineari una speciale resina epossidica. In questo modo si ottiene una migliore dissipazione del calore, che consente di raggiungere forze nominali più elevate. Inoltre, la mescola di tenuta assicura che il motore sia incapsulato e quindi protetto da danni esterni (ad es. durante il montaggio). Per applicazioni che richiedono velocità elevate o tempi di salita rapida della corrente, PI può progettare motori per tensioni operative molto elevate fino a 600 VDC.
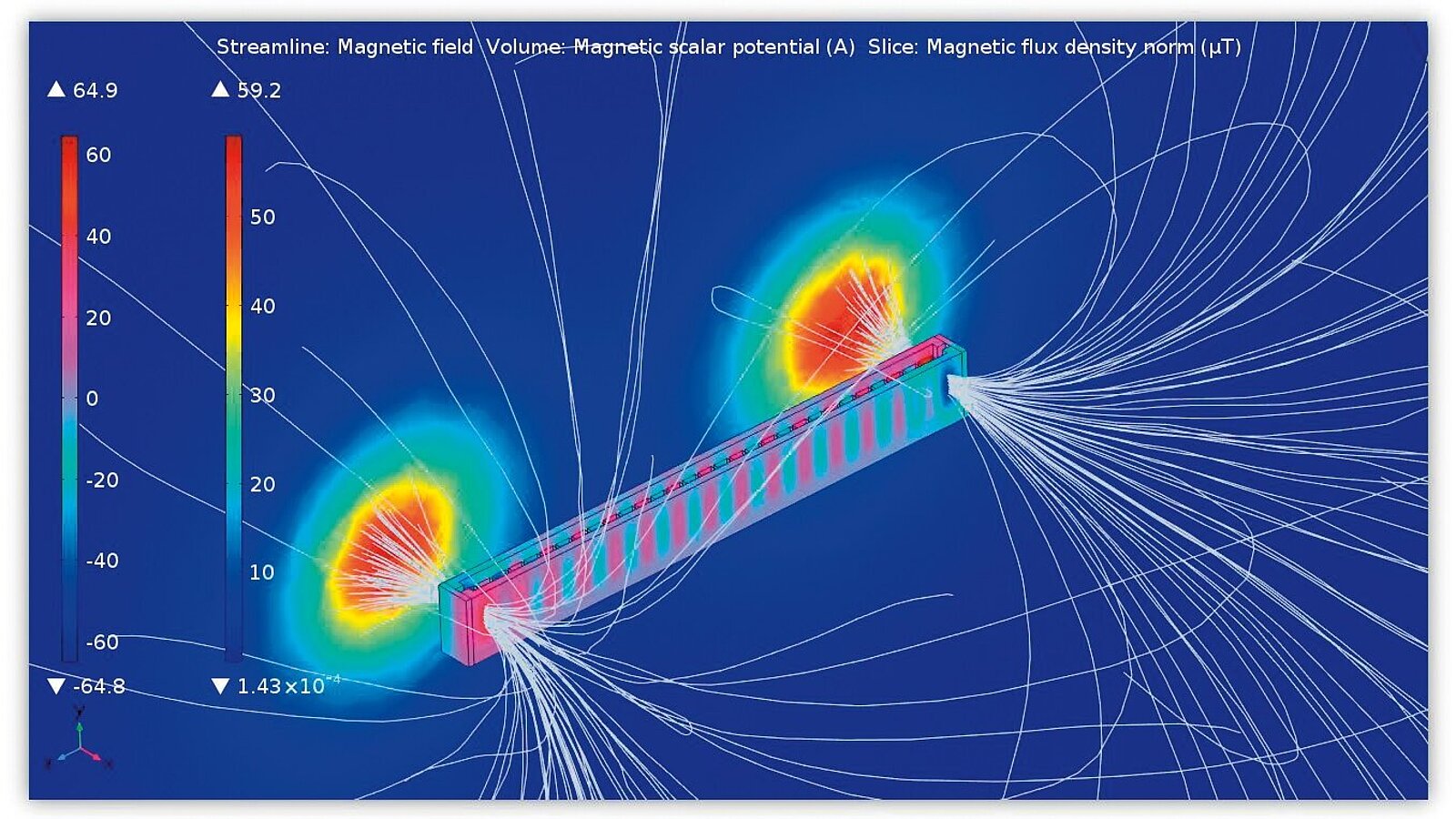
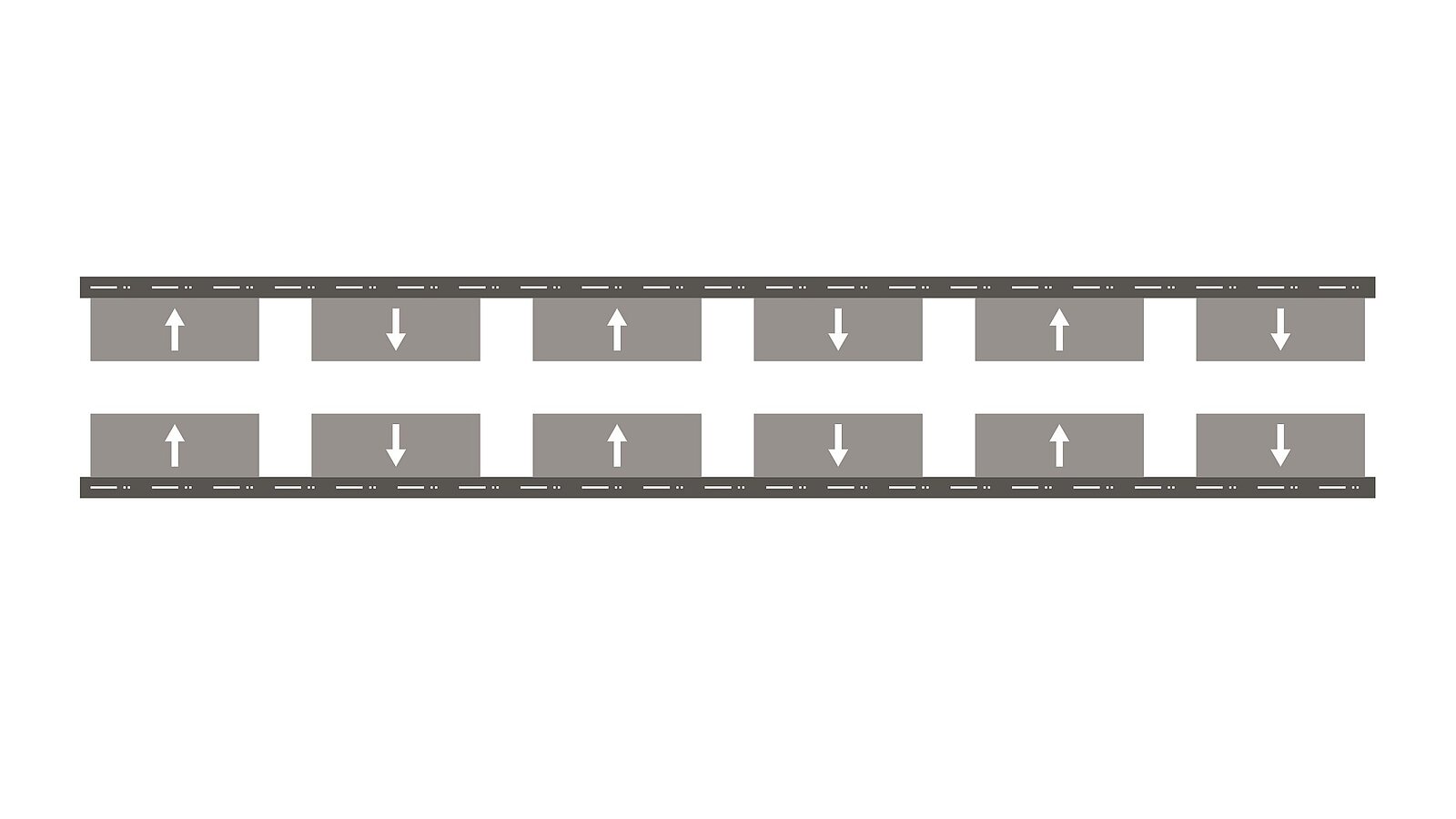
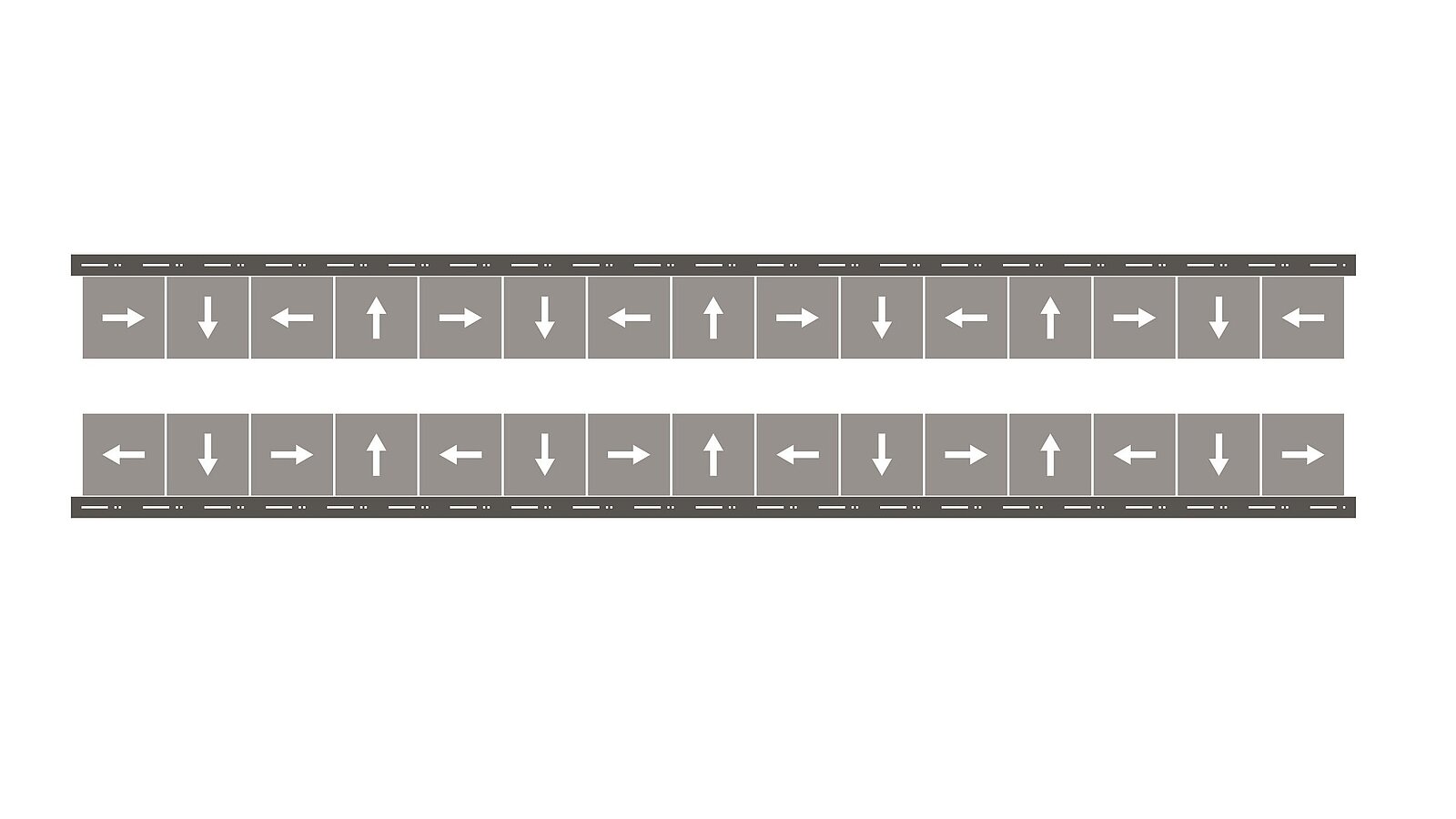
Le tracce magnetiche utilizzate nei motori lineari PI sono disponibili in varie lunghezze, possono essere collegate in serie per realizzare qualsiasi gamma di corsa desiderata. Sono disponibili tracce magnetiche su un solo lato o a U.
Le tracce magnetiche a forma di U raggiungono una maggiore intensità di campo magnetico e quindi forze più elevate rispetto a quelle su un solo lato. Se i magneti sono inoltre disposti come array di Halbach, l'intensità del campo magnetico può essere aumentata di circa il 10% rispetto alla disposizione da Polo Nord a il Polo Sud. Inoltre, in un array di Halbach, la contropiastra in ferro può essere omessa , rendendo queste tracce magnetiche molto più leggere. I vantaggi dell'utilizzo di un array Halbach valgono anche per le piste magnetiche su un solo lato. In questo caso, l'utilizzo di un array di Halbach, minimizza i campi di dispersione sul lato posteriore. PI offre supporti in carbonio per applicazioni che richiedono tracce magnetiche ultraleggere.
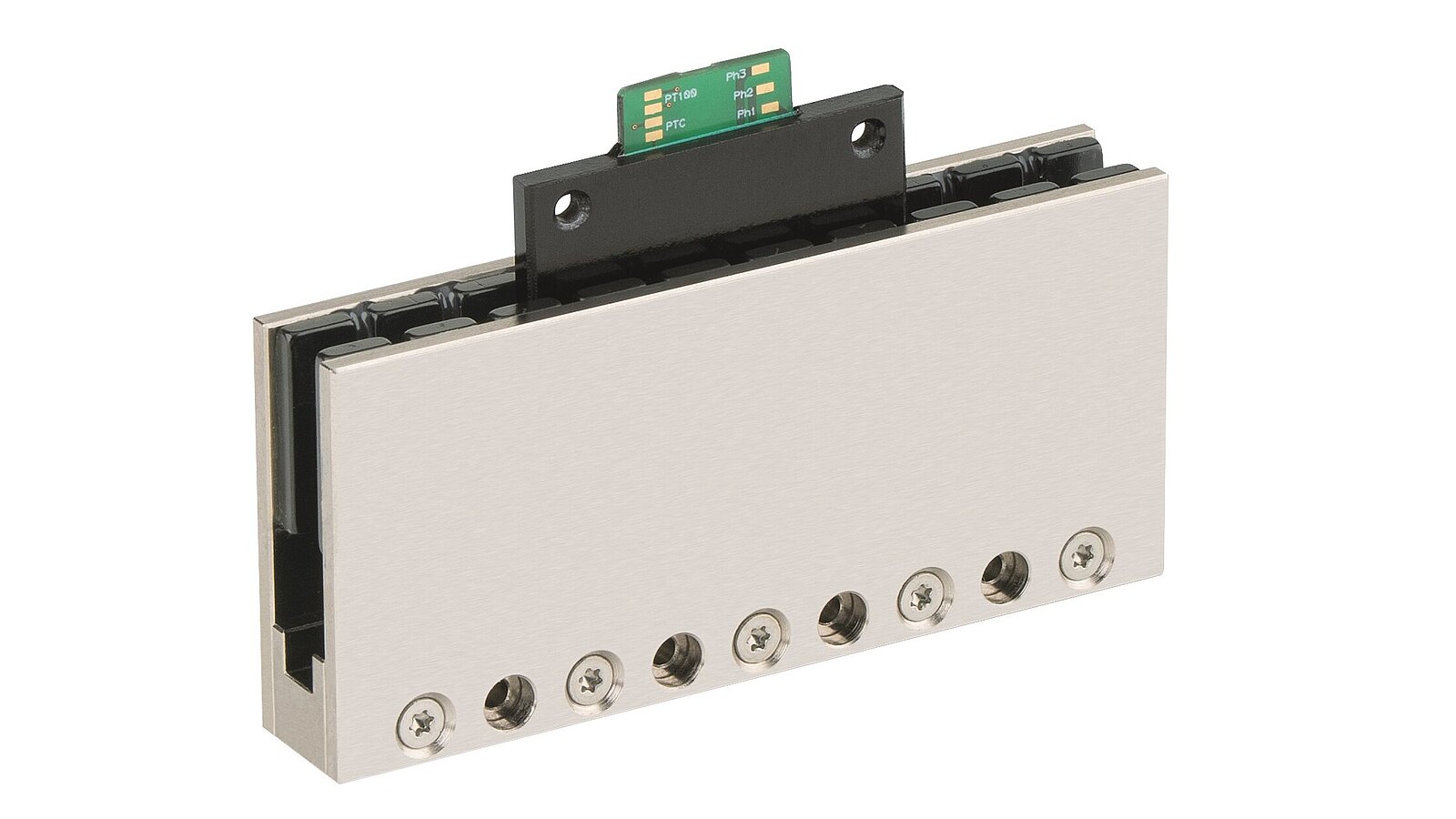
Nei motori con anima in ferro, il nucleo del gruppo bobina è costituito da ferro. Il ferro massimizza le forze magnetiche e contribuisce ad ottenere una elevata densità di forza e una alta stabilità termica. Per ridurre le perdite di corrente parassite, il ferro viene laminato ed è principalmente costituito da piastre di trasformazione impilate e isolate.
Il ferro nell'unità bobina causa forze di attrazione tra l'unità bobina e il gruppo magnete, provocando la formazione di cogging e quindi una fluttuazione della forza di avanzamento nel piano di traslazione. I denti marginali appositamente progettati ottimizzano il cogging. I motori lineari con nucleo in ferro sono indicati per applicazioni che richiedono forze e accelerazioni elevate pur avendo uno spazio di installazione limitato.
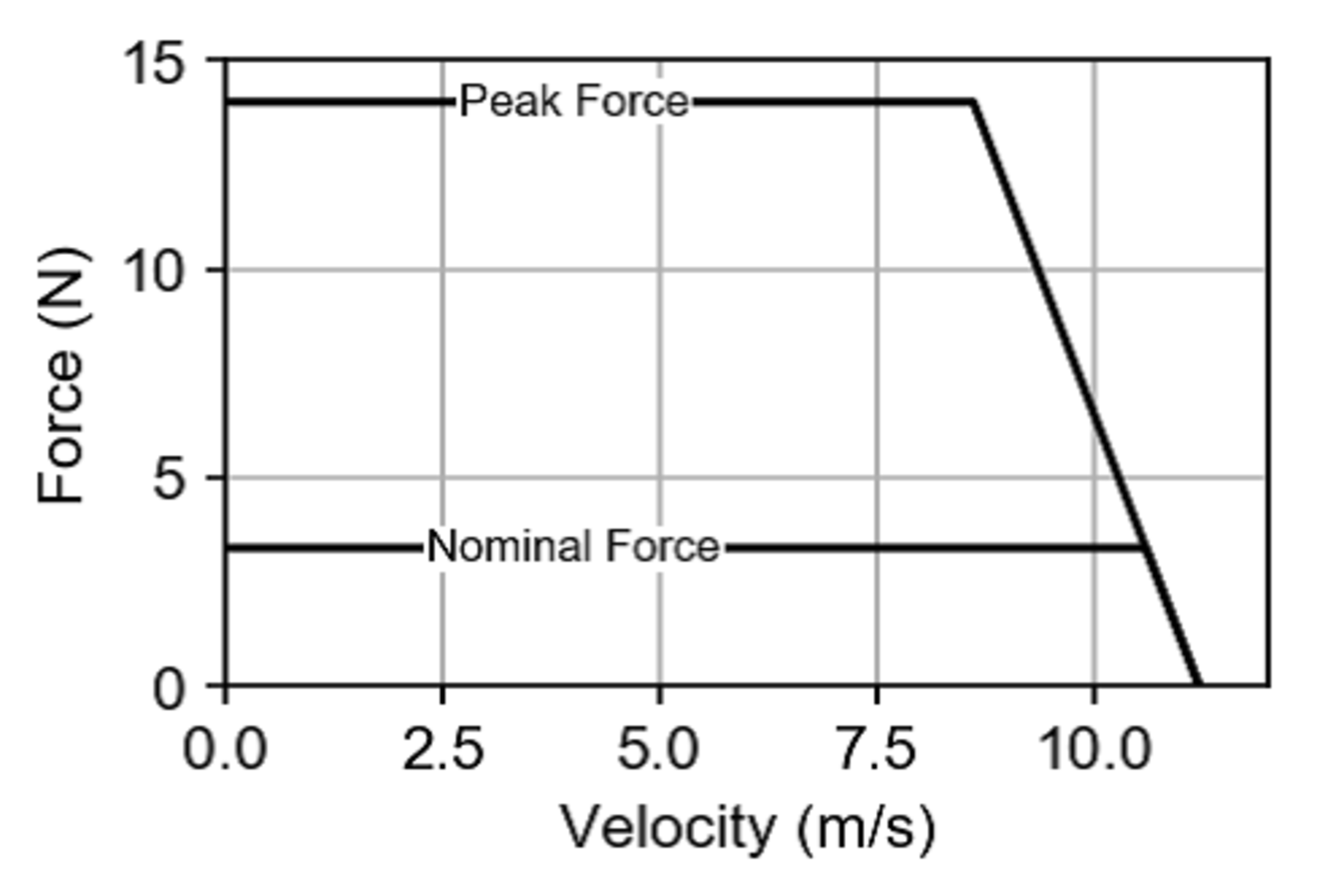
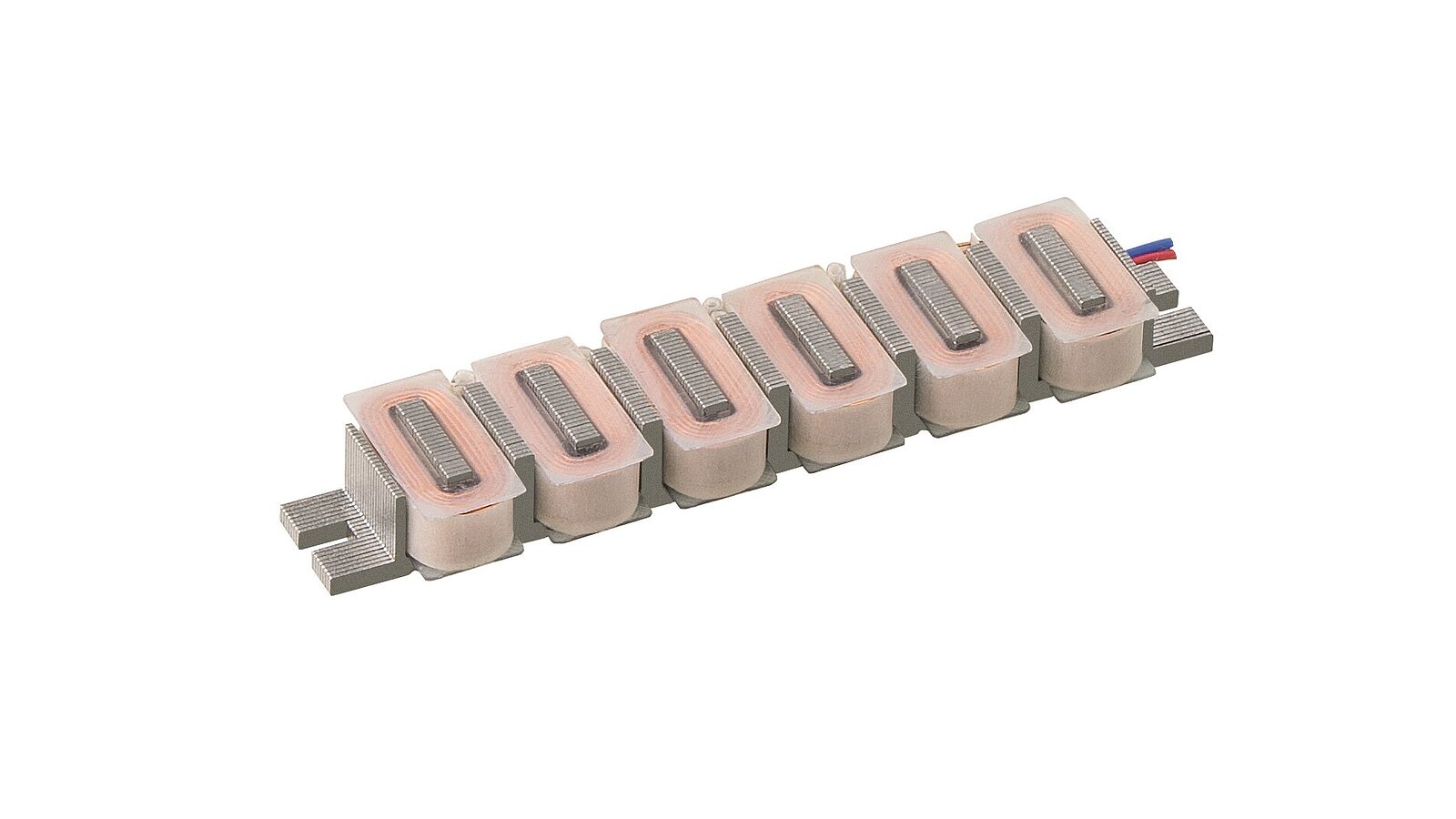


Il corpo di avvolgimento dei motori lineari senza ferro non ha un nucleo di ferro. Questo significa che non ci sono forze di attrazione tra la bobina e l'assemblaggio magnetico e non si verifica il cogging. La mancanza di un'anima in ferro inoltre riduce il peso stesso del motore. Dato che non c'è cogging che possa influenzare le guide e la velocità di alimentazione, e che il corpo di avvolgimento è più leggero, i motori senza ferro si distinguono per elevata accuratezza della corsa, elevata stabilità di velocità, e elevate accelerazioni. I requisiti di potenza e di dinamica possono essere soddisfatti incrementando il numero o la dimensione delle bobine del motore. Nella maggior parte dei casi, i motori amagnetici raggiungono forze nominali e di picco inferiori rispetto ai motori con anima in ferro. Ciò è dovuto alla mancanza di metalli termicamente conduttivi nella progettazione e alla conseguente limitata dissipazione di calore dalle bobine. I motori sono quindi protetti contro i sovraccarichi mediante sensori di temperatura.
I motori lineari amagnetici sono adatti per applicazioni che richiedono un'elevata dinamica in uno spazio di installazione compatto, pur avendo le massime esigenze di precisione.


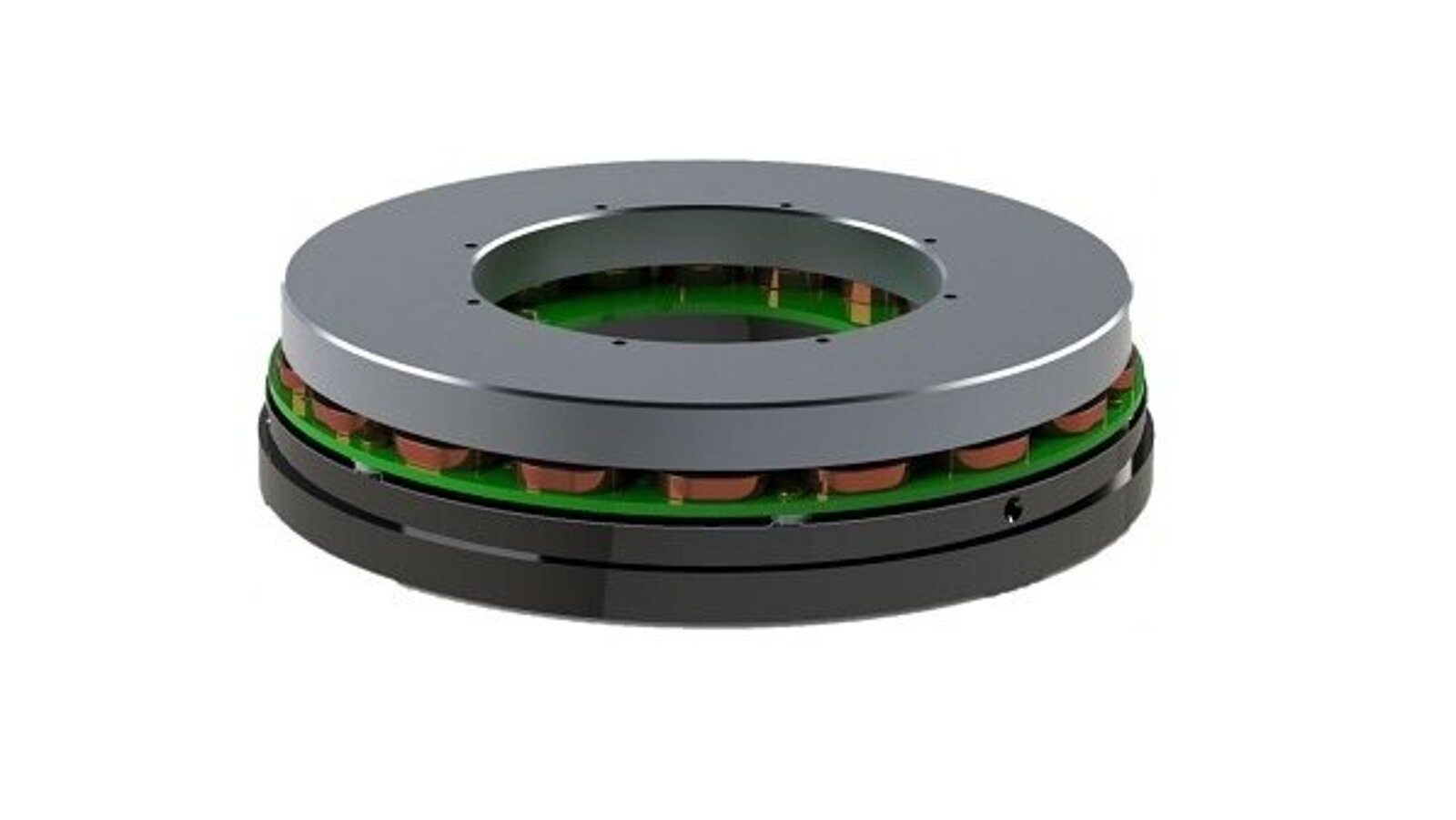
In linea di principio, un motore torque è un motore lineare disposto radialmente. Lo statore del motore torque contiene le bobine ed è saldamente montato; il rotore contiene il gruppo del magnete. Mentre la lunghezza del magnete scala linearmente, la coppia scala quadraticamente con il diametro. Pertanto, si generano grandi coppie su un grande diametro. Inoltre, le grandi dimensioni radiali consentono di creare aperture per il passaggio di raggi laser o cavi.
Grazie al principio dell'azionamento diretto, i motori torque sono privi di gioco meccanico. L'assenza di gioco consente una elevata accuratezza di posizionamento e un'elevata rigidità di azionamento, con conseguente elevata ripetibilità. L'elevata coppia motrice consente un'elevata accelerazione e quindi un'elevata dinamica. Altre caratteristiche aggiuntive sono l'alta rigidità torsionale, le coppie di picco elevate, gli alti gradi di efficienza e il funzionamento molto fluido.
Tra l'altro, i motori torque, grazie al loro design compatto per quanto riguarda la coppia e la simmetria di rotazione, sono adatti per stage di rotazione ad alto carico su assi singoli o multiasse.

Posizione, Velocità, e Controllo della Forza
Poiché sono controllati in corrente, con la forza motrice che dipende linearmente dalla essa, gli azionamenti magnetici diretti possono essere azionati non solo in base al controllo della posizione o della velocità, ma anche in base al controllo della forza.
Il controllo della forza consente il funzionamento con una forza di tenuta o di avanzamento definita. I sensori di forza e di posizionamento possono essere letti individualmente o simultaneamente in un doppio loop di controllo. Oltre al puro controllo della forza, anche il controllo della posizione e della velocità subordinato è una possibilità. La funzione auto-zero definisce la corrente di tenuta alla quale il dispositivo produce una forza di 0 N durante le operazioni in open-loop.
Compensazione della Forza del Peso

Gli azionamenti magnetici diretti installati verticalmente devono sostenere sia la piattaforma di movimento che il carico dell'applicazione contro la gravità. Ciò è possibile grazie alla compensazione della forza del peso. Questa viene adattata al carico e mantiene in posizione i componenti da muovere, anche senza forze del motore. Ciò consente di utilizzare la forza del motore esclusivamente per la funzione di posizionamento. La forza del peso può essere compensata magneticamente, pneumaticamente o meccanicamente. PI utilizza metodi diversi a seconda delle prestazioni richieste.

















Download
PIMag®: Voice Coil, Linear, and Torque Motors Developed In-house
Individual design of magnetic direct drives for flexible, competitive, and application-specific positioning solutions
Rotating Electric Motors for Precision Positioning
An application-related comparison of different motor types