F-572.630 Novità!
Photonics alignment system with 3 linear axes: X, Y, Z; 60 mm travel range in X, Y, Z; 500 mm/s maximum linear axis velocity; 50 nm minimum incremental motion in X, Y, Z; adapter for rotational axes at bottom; controller included
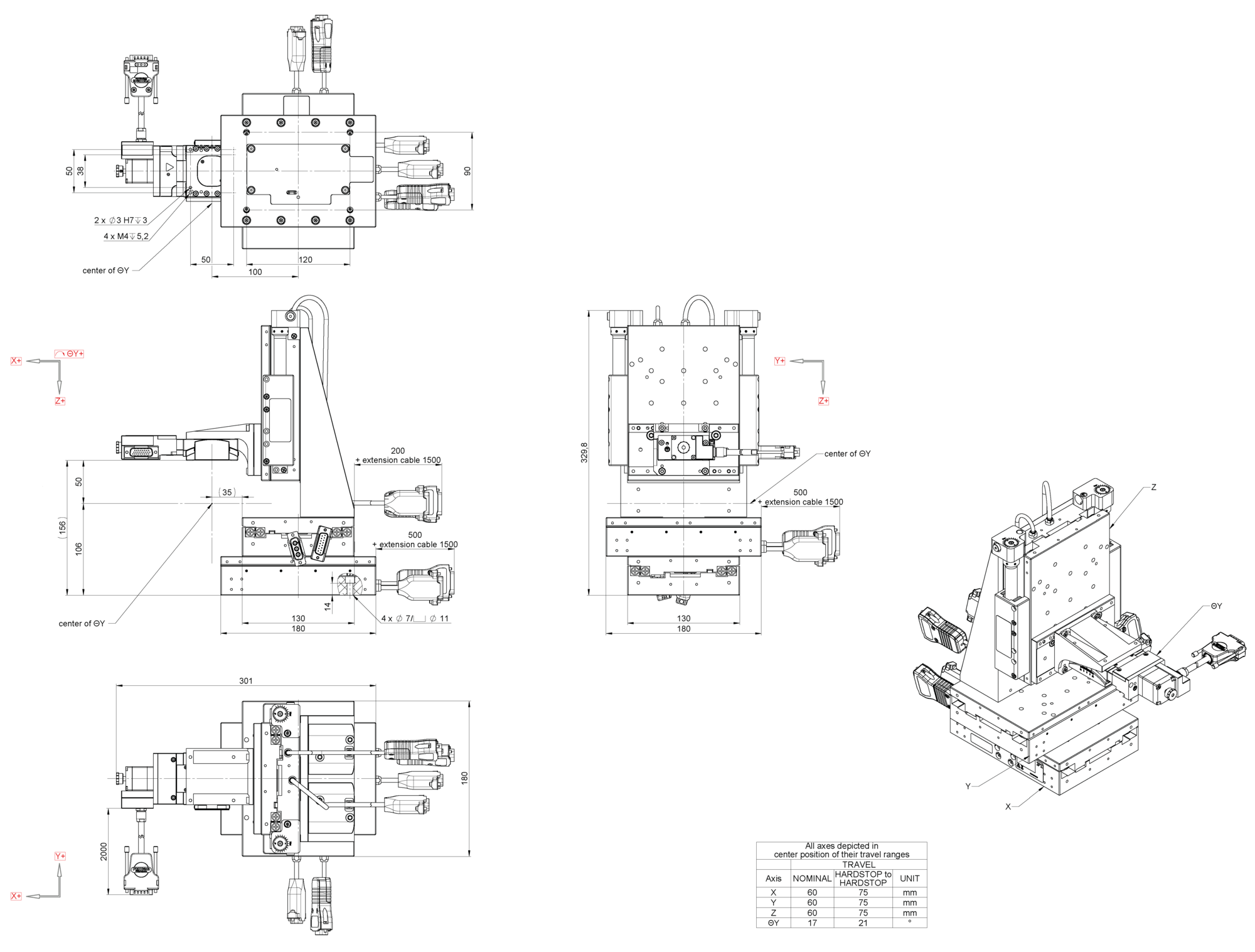
Dimensions of the F-572.64X and F-572.64XN
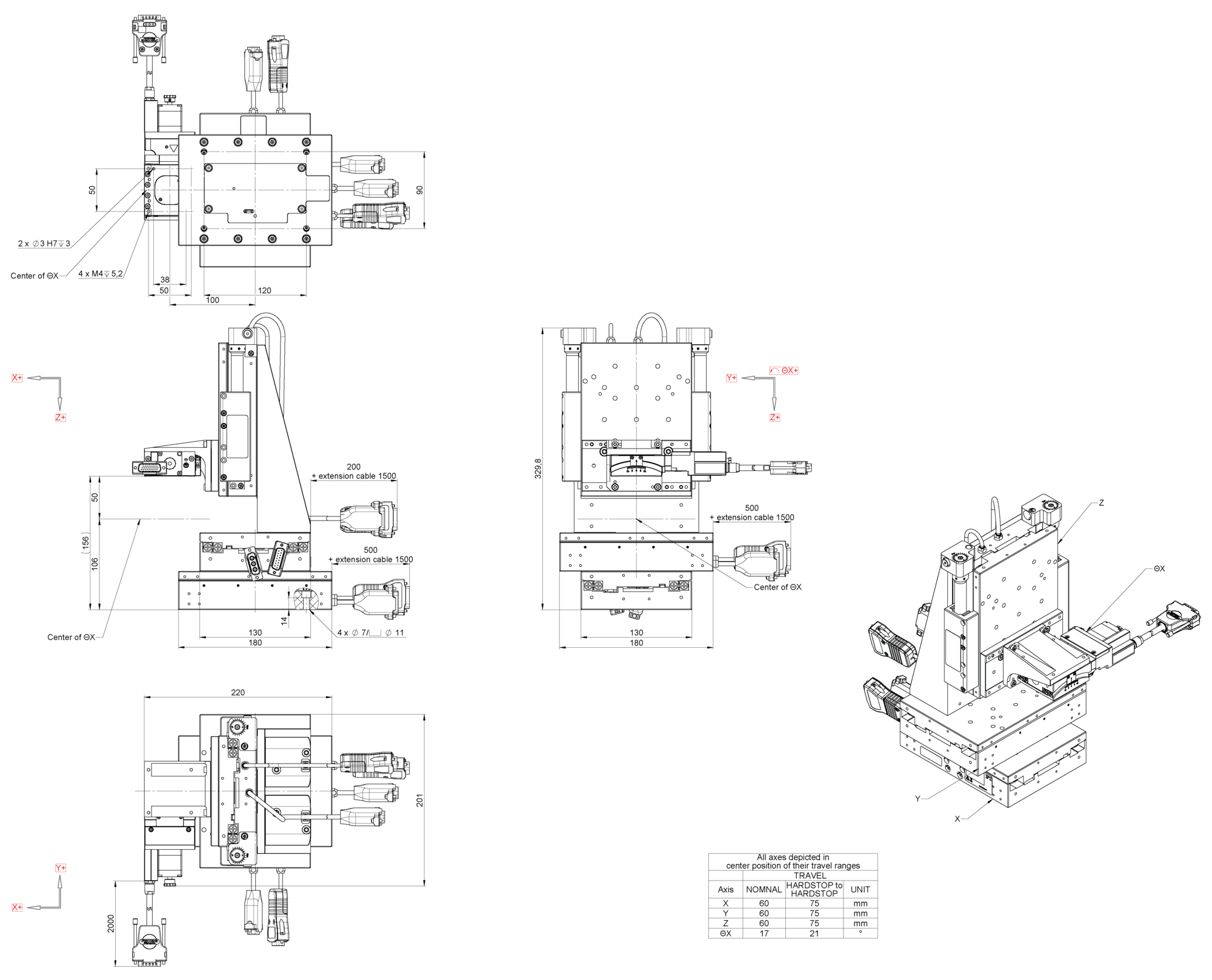
Dimensions of the F-572.64Y and F-572.64YN
Dimensions of the F-572.74X and F-572.74XN
Dimensions of the F-572.74Y and F-572.74YN
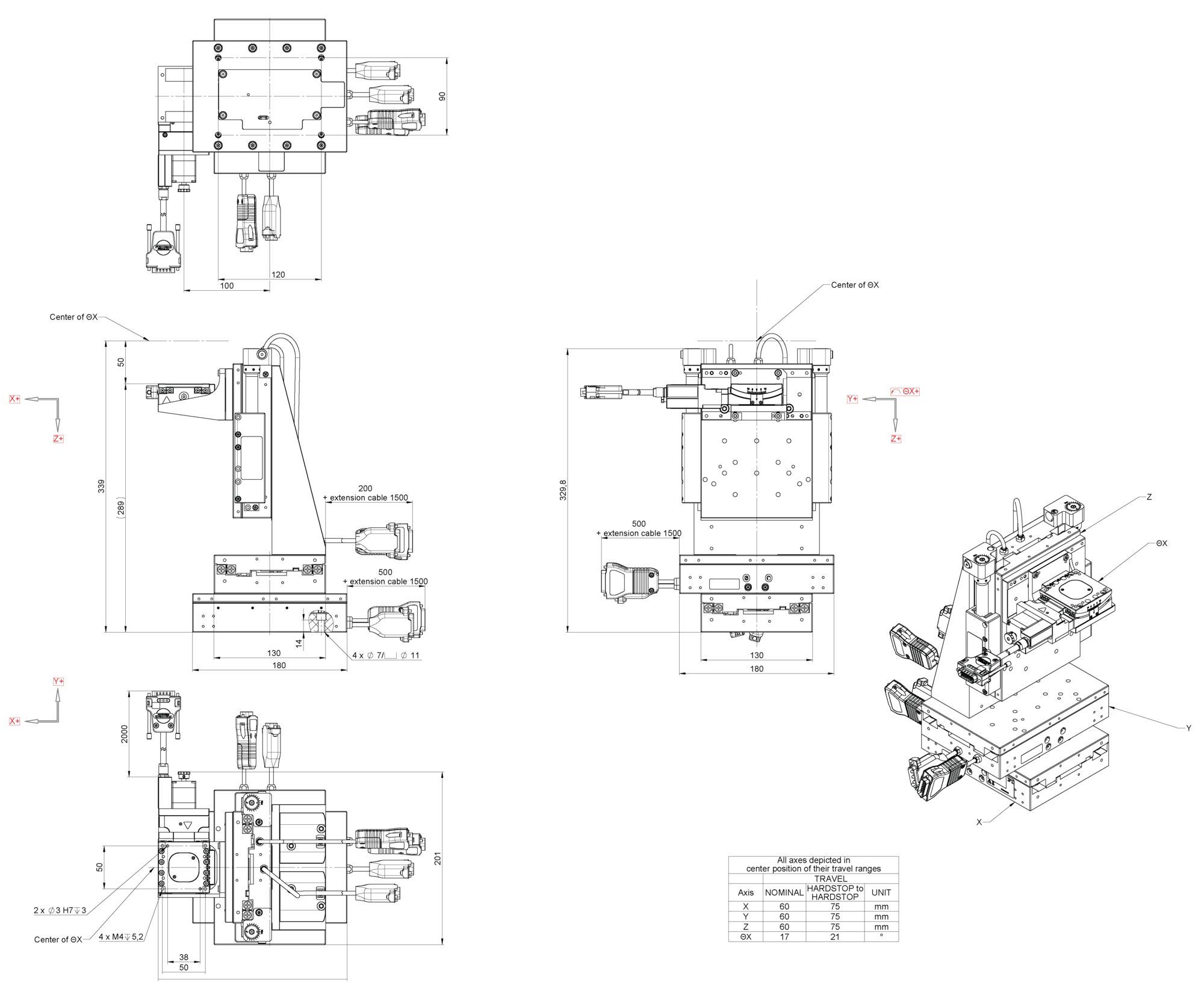
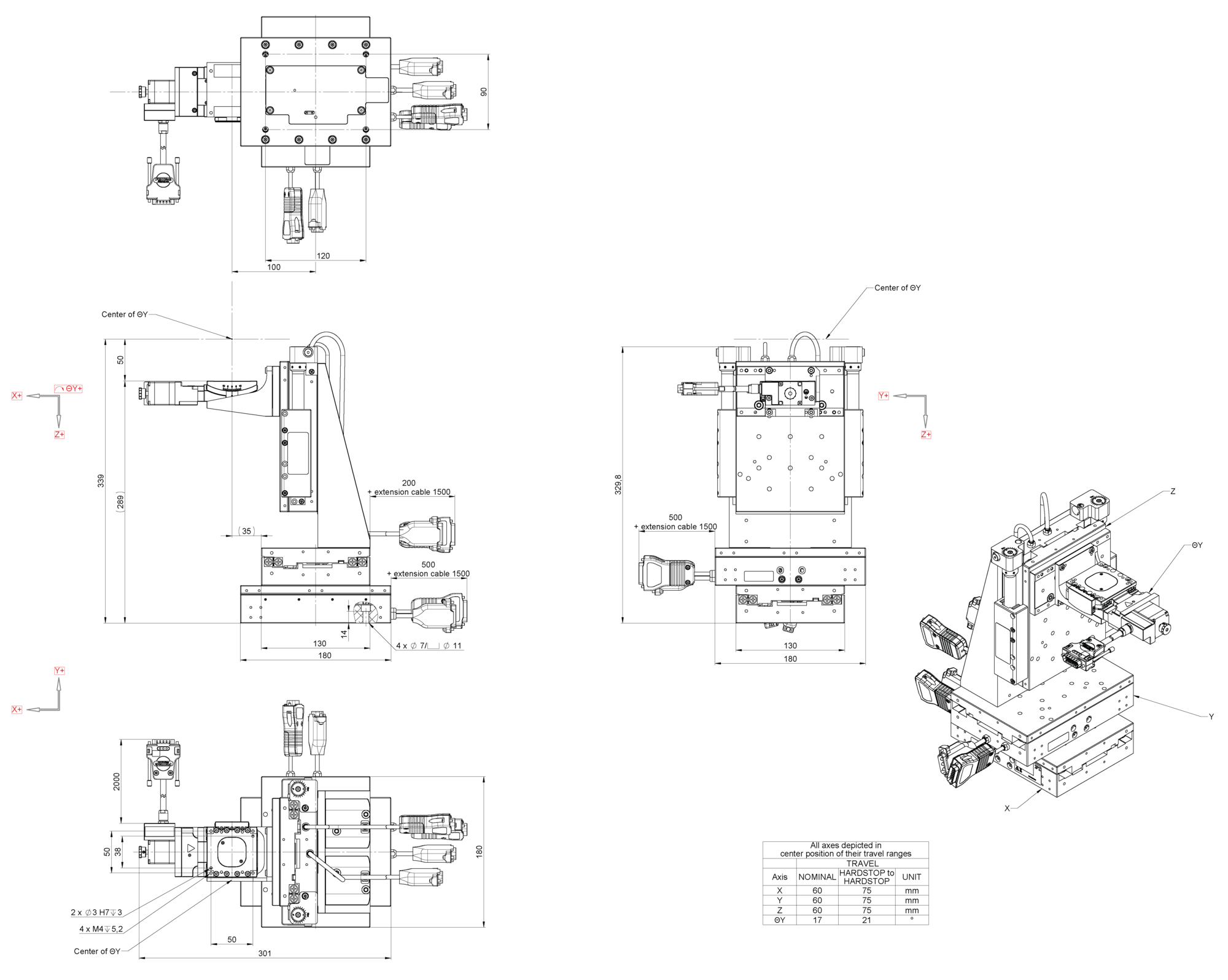
Dimensions of the F-572.630 and F-572.630N
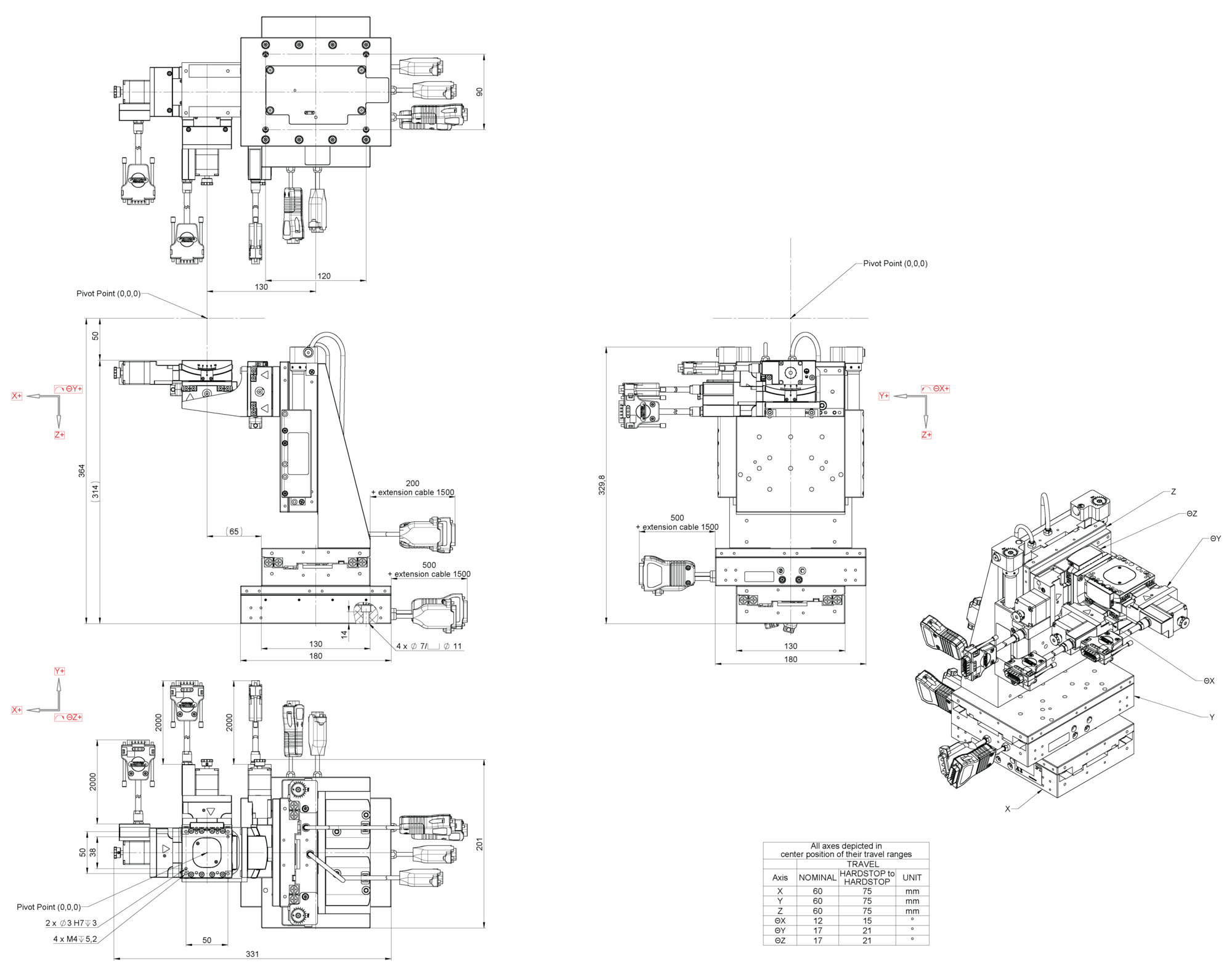
Dimensions of the F-572.663 and F-572.663N
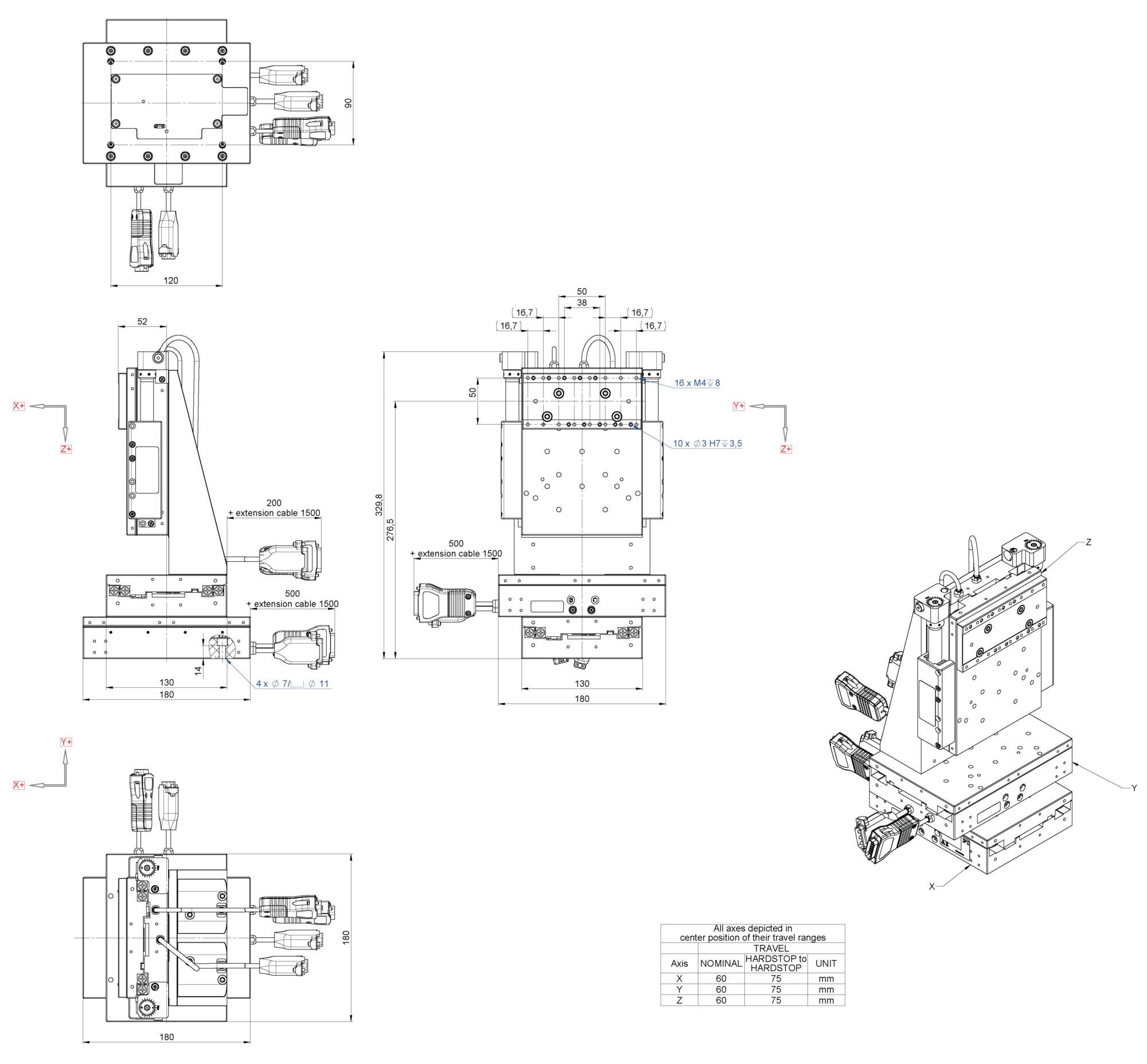
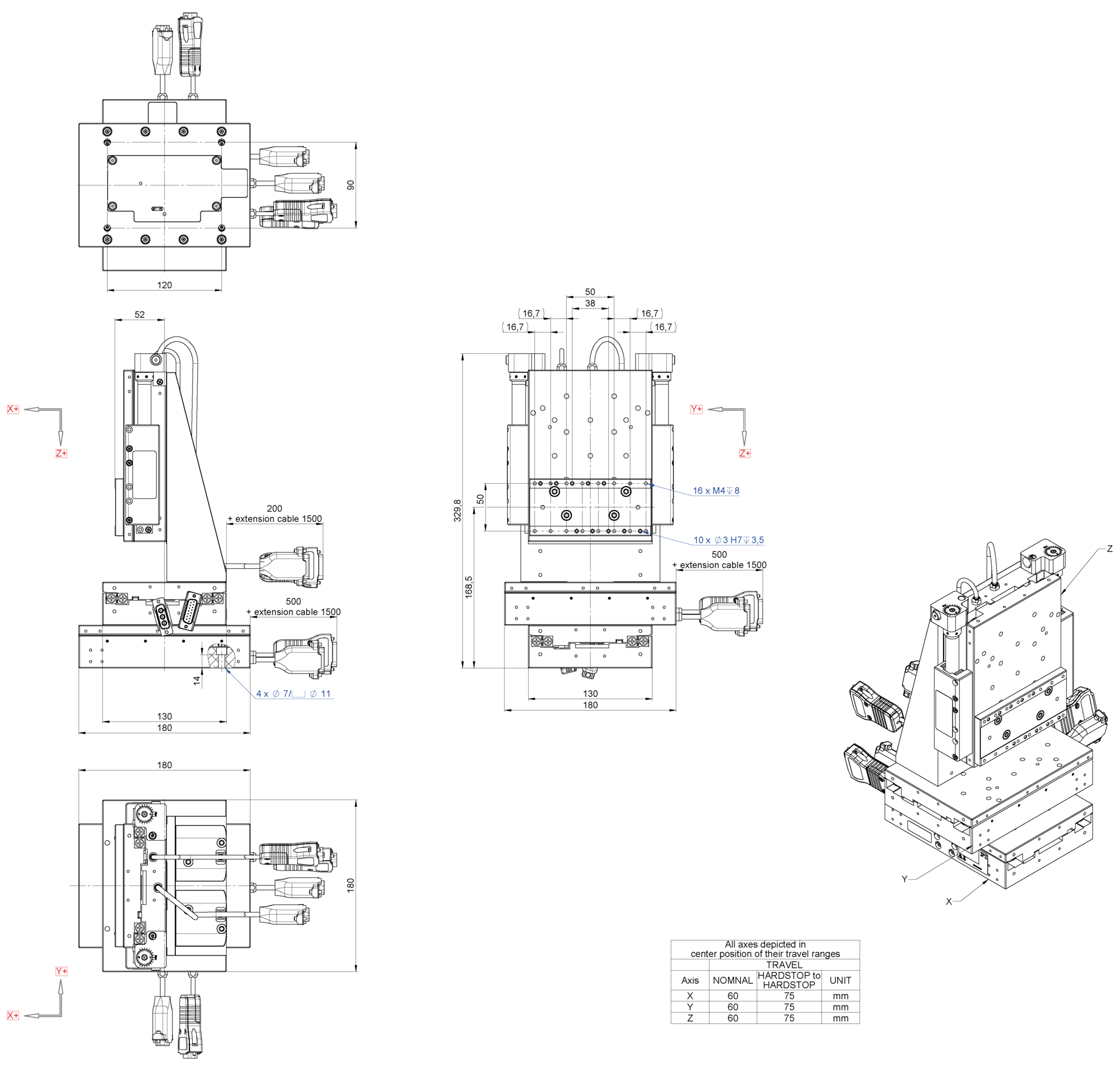
Dimensions of the F-572.730 and F-572.730N
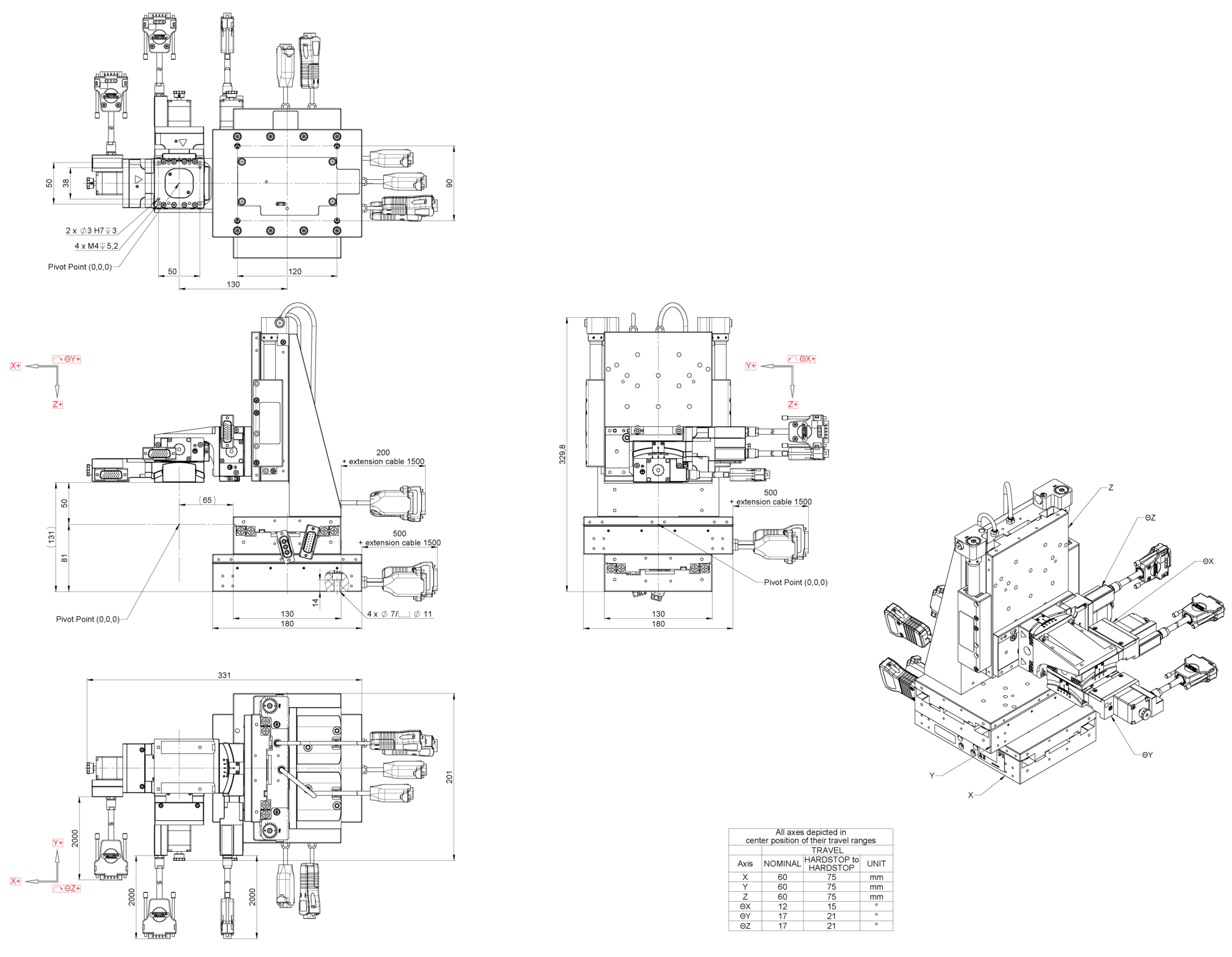
Dimensions of the F-572.763 and F-572.763N









A preconfigured ACS controller that controls all axes is included in the alignment system's scope of delivery. FMPA routines for rapid area scans and gradient searches have been implemented in the controller (ACS buffer). This drastically reduces alignment times in the process sequence; and with it the associated costs. As an ideal add-on for F-572, the ultrafast PILightning algorithm for first-light search is optionally available.
Applications and use cases
Due to its high load capacity (2 kg) and excellent accuracy, the system is ideal for applications in the following fields:
High-end multichip-level testing
LIDAR
Advanced packaging
Technology
The linear axes achieve high velocities thanks to their compact, high-performance magnetic linear drives; direct metrology ensures high-precision control thanks to a high-resolution optical linear encoder. The system has an extremely compact footprint for its load capacity. Overall, the system is ideally suited for demanding photonics tasks.
Controller and software
The system includes an ACS controller with industry-grade interfaces (TCP/IP and EtherCAT) and excellent control performance as well as user-friendly software featuring fast and powerful alignment algorithms. The PI's extremely fast PILightning algorithm is optionally available.
| Motion | F-572.630[N]F-572.730[N] | F-572.64X[N]F-572.74X[N] | F-572.64Y[N]F-572.74Y[N] | F-572.663[N]F-572.763[N] |
|---|---|---|---|---|
| Number of active axes | 3 | 4 | 4 | 6 |
| Active linear axes | X, Y, Z | X, Y, Z | X, Y, Z | X, Y, Z |
| Active rotational axes | — | θX | θY | θX, θY, θZ |
| Rotational axis position for F‑572.6xx[N] | Adapter at bottom | Bottom | Bottom | Bottom |
| Rotational axis position for F‑572.7xx[N] | Adapter on top | Top | Top | Top |
| Travel range in X, Y, Z | 60 mm | 60 mm | 60 mm | 60 mm |
| Rotation range in θX | — | 17° | — | 12° |
| Rotation range in θY | — | — | 17° | 17° |
| Rotation range in θZ | — | — | — | 17° |
| Maximum velocity in X, Y, Z | 500 mm/s | 500 mm/s | 500 mm/s | 500 mm/s |
| Maximum angle velocity in θX, θY, θZ | — | 10 °/s | 10 °/s | 10 °/s |
| Positioning | F-572.630[N]F-572.730[N] | F-572.64X[N]F-572.74X[N] | F-572.64Y[N]F-572.74Y[N] | F-572.663[N]F-572.763[N] |
| F-572.6xx, F-572.7xx: Minimum incremental motion in X, Y, Z1) | 50 nm | 50 nm | 50 nm | 50 nm |
| F-572.6xxN, F-572.7xxN: Minimum incremental motion in X, Y, Z1) | 5 nm | 5 nm | 5 nm | 5 nm |
| Minimum incremental motion in θX, θY, θZ1) | — | 5 µrad | 5 µrad | 5 µrad |
| Bidirectional repeatability in X, Y, Z; 10 % travel range1) | 150 nm | 150 nm | 150 nm | 150 nm |
| Bidirectional repeatability in θX, θY, θZ; 10 % travel range1) | — | 25 µrad | 25 µrad | 25 µrad |
| Sensor specifications | F-572.630[N]F-572.730[N] | F-572.64X[N]F-572.74X[N] | F-572.64Y[N]F-572.74Y[N] | F-572.663[N]F-572.763[N] |
| Sensor type X, Y, Z | Incremental linear encoder | |||
| Sensor signal X, Y, Z | Sin/cos, 1 V peak-to-peak | |||
| Sensor type θX, θY, θZ | Incremental linear encoder | |||
| Sensor signal θX, θY, θZ | A/B quadrature, RS-422 | |||
| Drive properties | F-572.630[N]F-572.730[N] | F-572.64X[N]F-572.74X[N] | F-572.64Y[N]F-572.74Y[N] | F-572.663[N]F-572.763[N] |
| Drive type X, Y, Z | Ironless 3-phase linear motor | |||
| Drive type θX, θY, θZ | — | 2-phase stepper motor | ||
| PWM amplifier | F-572.6xx, F-572.7xx: —F-572.6xxN, F-572.7xxN: yes | |||
| Mechanical properties | F-572.630[N]F-572.730[N] | F-572.64X[N]F-572.74X[N] | F-572.64Y[N]F-572.74Y[N] | F-572.663[N]F-572.763[N] |
| Max. payload | 2 kg | 2 kg | 2 kg | 2 kg |
| GND | 13.8 kg | 14.5 kg | 14.5 kg | 16.2 kg |
| Mass including controller | Approx. 29 kg | Approx. 30 kg | Approx. 30 kg | Approx. 32 kg |
| Alignment | F-572 | |||
| Scanning time of spiraled area scan 100 µm Ø2) | < 1 s | |||
| Scanning time of spiraled area scan 500 µm Ø2) | < 10 s | |||
| Signal optimization with gradient search3), randomized with ±5 μm (repeatability < 0.01 dB) | 5 s | |||
| Requirements for the power meter used | F-572 | |||
| Maximum output voltage range | 10 V | |||
| Minimum bandwidth | 20 kHz | |||
| Maximum noise level | 120 dBm | |||
| Miscellaneous | F-572.630[N]F-572.730[N] | F-572.64X[N]F-572.74X[N] | F-572.64Y[N]F-572.74Y[N] | F-572.663[N]F-572.763[N] |
| Controller for F-572 without PWM amplifier | G-901K068 | G-901K069 | ||
| Controller for F-572 with PWM amplifier | G-901K071 | G-901K072 | ||
Ask for a free quote on quantities required, prices, and lead times or describe your desired modification.
Photonics alignment system with 3 linear axes: X, Y, Z; 60 mm travel range in X, Y, Z; 500 mm/s maximum linear axis velocity; 50 nm minimum incremental motion in X, Y, Z; adapter for rotational axes at bottom; controller included
Photonics alignment system with 3 linear axes: X, Y, Z; 60 mm travel range in X, Y, Z; 500 mm/s maximum linear axis velocity; 5 nm minimum incremental motion in X, Y, Z; adapter for rotational axes at bottom; PWM amplifier; controller with PWM amplifier included
Photonics alignment system with 3 linear axes: X, Y, Z; 60 mm travel range in X, Y, Z; 500 mm/s maximum linear axis velocity; 50 nm minimum incremental motion in X, Y, Z; adapter for rotational axes on top; controller included
Photonics alignment system with 3 linear axes: X, Y, Z; 60 mm travel range in X, Y, Z; 500 mm/s maximum linear axis velocity; 5 nm minimum incremental motion in X, Y, Z; adapter for rotational axes on top; PWM amplifier; controller with PWM amplifier included
Photonics alignment system with 3 linear axes and 1rotational axis: X, Y, Z, θX; 60 mm travel range in X, Y, Z; 17° rotation range in θX; 500 mm/s maximum linear axis velocity; 10 °/s maximum rotational axis velocity; 50 nm minimum incremental motion in X, Y, Z; 5 μrad minimum incremental motion in θX; rotational axis at bottom; controller included
Photonics alignment system with 3 linear axes and 1rotational axis: X, Y, Z, θX; 60 mm travel range in X, Y, Z; 17° rotation range in θX; 500 mm/s maximum linear axis velocity; 10 °/s maximum rotational axis velocity; 5 nm minimum incremental motion in X, Y, Z; 5 μrad minimum incremental motion in θX; rotational axis at bottom; PMW amplifier; controller with PWM amplifier included
Photonics alignment system with 3 linear axes and 1rotational axis: X, Y, Z, θX; 60 mm travel range in X, Y, Z; 17° rotation range in θX; 500 mm/s maximum linear axis velocity; 10 °/s maximum rotational axis velocity; 50 nm minimum incremental motion in X, Y, Z; 5 μrad minimum incremental motion in θX; rotational axis on top; controller included
Photonics alignment system with 3 linear axes and 1rotational axis: X, Y, Z, θX; 60 mm travel range in X, Y, Z; 17° rotation range in θX; 500 mm/s maximum linear axis velocity; 10 °/s maximum rotational axis velocity; 5 nm minimum incremental motion in X, Y, Z; 5 μrad minimum incremental motion in θX; rotational axis on top; PMW amplifier; controller with PWM amplifier included
Photonics alignment system with 3 linear axes and 1rotational axis: X, Y, Z, θY; 60 mm travel range in X, Y, Z; 17° rotation range in θY; 500 mm/s maximum linear axis velocity; 10 °/s maximum rotational axis velocity; 50 nm minimum incremental motion in X, Y, Z; 5 μrad minimum incremental motion in θY; rotational axis at bottom; controller included
Photonics alignment system with 3 linear axes and 1rotational axis: X, Y, Z, θY; 60 mm travel range in X, Y, Z; 17° rotation range in θY; 500 mm/s maximum linear axis velocity; 10 °/s maximum rotational axis velocity; 5 nm minimum incremental motion in X, Y, Z; 5 μrad minimum incremental motion in θY; rotational axis at bottom; PMW amplifier; controller with PWM amplifier included
Photonics alignment system with 3 linear axes and 1rotational axis: X, Y, Z, θY; 60 mm travel range in X, Y, Z; 17° rotation range in θY; 500 mm/s maximum linear axis velocity; 10 °/s maximum rotational axis velocity; 50 nm minimum incremental motion in X, Y, Z; 5 μrad minimum incremental motion in θY; rotational axis on top; controller included
Photonics alignment system with 3 linear axes and 1rotational axis: X, Y, Z, θY; 60 mm travel range in X, Y, Z; 17° rotation range in θY; 500 mm/s maximum linear axis velocity; 10 °/s maximum rotational axis velocity; 5 nm minimum incremental motion in X, Y, Z; 5 μrad minimum incremental motion in θY; rotational axis on top; PMW amplifier; controller with PWM amplifier included
Photonics alignment system with 3 linear axes and 3 rotational axes: X, Y, Z, θX, θY, θZ; 60 mm travel range in X, Y, Z; 12° rotation range in θX; 17° rotation range in θY, θZ, 500 mm/s maximum linear axis velocity; 10 °/s maximum rotational axis velocity; 50 nm minimum incremental motion in X, Y, Z; 5 μrad minimum incremental motion in θX, θY, θZ; rotational axis at bottom; controller included
Photonics alignment system with 3 linear axes and 3 rotational axes: X, Y, Z, θX, θY, θZ; 60 mm travel range in X, Y, Z; 12° rotation range in θX; 17° rotation range in θY, θZ, 500 mm/s maximum linear axis velocity; 10 °/s maximum rotational axis velocity; 5 nm minimum incremental motion in X, Y, Z; 5 μrad minimum incremental motion in θX, θY, θZ; rotational axis at bottom; PWM amplifier; controller with PWM amplifier included
Photonics alignment system with 3 linear axes and 3 rotational axes: X, Y, Z, θX, θY, θZ; 60 mm travel range in X, Y, Z; 12° rotation range in θX; 17° rotation range in θY, θZ, 500 mm/s maximum linear axis velocity; 10 °/s maximum rotational axis velocity; 50 nm minimum incremental motion in X, Y, Z; 5 μrad minimum incremental motion in θX, θY, θZ; rotational axis on top; controller included
Photonics alignment system with 3 linear axes and 3 rotational axes: X, Y, Z, θX, θY, θZ; 60 mm travel range in X, Y, Z; 12° rotation range in θX; 17° rotation range in θY, θZ, 500 mm/s maximum linear axis velocity; 10 °/s maximum rotational axis velocity; 5 nm minimum incremental motion in X, Y, Z; 5 μrad minimum incremental motion in θX, θY, θZ; rotational axis on top; PWM amplifier; controller with PWM amplifier included
Firmware feature for F-572 alignment systems; fast first-light search; for surface and edge coupling
Cable holder for F-572 alignment systems
Adapter plate for breadboard mounting of F-572 alignment systems, 150 mm x 150 mm, hole pattern for M6 thread
Fiber holder for F-572 alignment systems, for surface coupling, 8° angle
Fiber holder for F-572 alignment systems, for edge coupling
Fiber array holder for F-572 alignment systems, for surface coupling, 8° angle
Fiber array holder for F-572 alignment systems, for edge coupling
Ricevere rapidamente una risposta alla tua risposta via email o telefono da un Sales Engineer dalla sede PI più vicina a te.