
Strict regulations apply for the safety of personnel in manufacturing environments. When fast movements are carried out and large forces act, it is necessary to take special safety measures. Typically barriers, e.g. fences that spatially separate people from the machines, are common and relatively easy-to-integrate solutions. However, if mechanical systems cannot be installed or if the work process is influenced by them, contact-free safety concepts such as a light grid or a light curtain can be used. A light curtain forms a close-meshed protective field and, therefore, secures the access to the danger zone.
When Is It Useful and Necessary to Use a Safety Device While Hexapods Are in Operation?

Hexapods are >> six-axis parallel-kinematic positioning systems with a limited workspace that can often be safely integrated into industrial setups. The situation is different for dynamic motion hexapods because of their high speed and acceleration, which can become a hazard for people who work in their immediate workspace. Mainly, this is due to the limited human reaction time to quickly remove endangered body parts from a given danger. When a collision occurs high impulse forces due to mass inertia and crushing of limbs are possible. A safety system can protect people and minimize this risk of injury.
Depending on the version, PI hexapod controllers feature a motion stop input. The input is used for connecting external hardware (e.g. push buttons or switches) and it deactivates or activates the power supply of the hexapod drives. However, the motion stop socket does not offer any direct safety function in accordance with applicable standards (e.g. IEC 60204-1, IEC 61508, or IEC 62061).
For this purpose, a >> light curtain from PILZ (approved in accordance with EN/IEC 61508 and EN/IEC 61496-1/-2) can, for example, be integrated into the control of the hexapod.
Safety light curtains are made of an emitting (transmitting) and a receiving unit. In the emitting unit, light sources that radiate toward the receiving unit are arranged at an even distance from each other (e.g. LEDs). The receiving unit is equipped with detectors in the same arrangement (e.g. photodiodes), each being responsible for the detection of its opposite light source. The resolution, i.e. the distance between the light sources, determines the level of protection provided (finger, hand, or body protection).
If one of the light beams is interrupted, the light barrier outputs the information via two so called OSSD (Output Switching Signal Device) outputs. In the standard state, the outputs are at 24 V and fall to 0 V briefly and asynchronously from each other for the purpose of self-monitoring. To be able to interpret the output signals, a suitable and certified safety relay is required that switches off or stops the machine movement in the event of a failure.
Design of the Light Curtain – Definition of the Safety Level, Minimum Distance, and Setup
The risk assessment according to EN ISO 13849-1 can be used to assess the hazardous situation and, therefore, the requirements for the safety system. The minimum distance between the safety device and the danger zone is calculated with the EN ISO 13855 standard. This dimension is important to be able to define the maximum range the light barrier must monitor. It should be noted that different speeds of approach apply to the different degrees of protection (person, hand, or finger).
A close-meshed light curtain with a resolution of 30 mm was chosen as the safety device for the hexapod and it was assumed that the required stopping distance was 3 mm at a motion velocity of the hexapod of 100 mm/s.
Using the following formula, which is valid for light curtains with a resolution of < 40 mm, a safety distance of 316 mm can be calculated:

S = safety distance, v = approach velocity, t1 and t2 = triggering time of the electronics and braking time of the machine, d = resolution of the light barrier
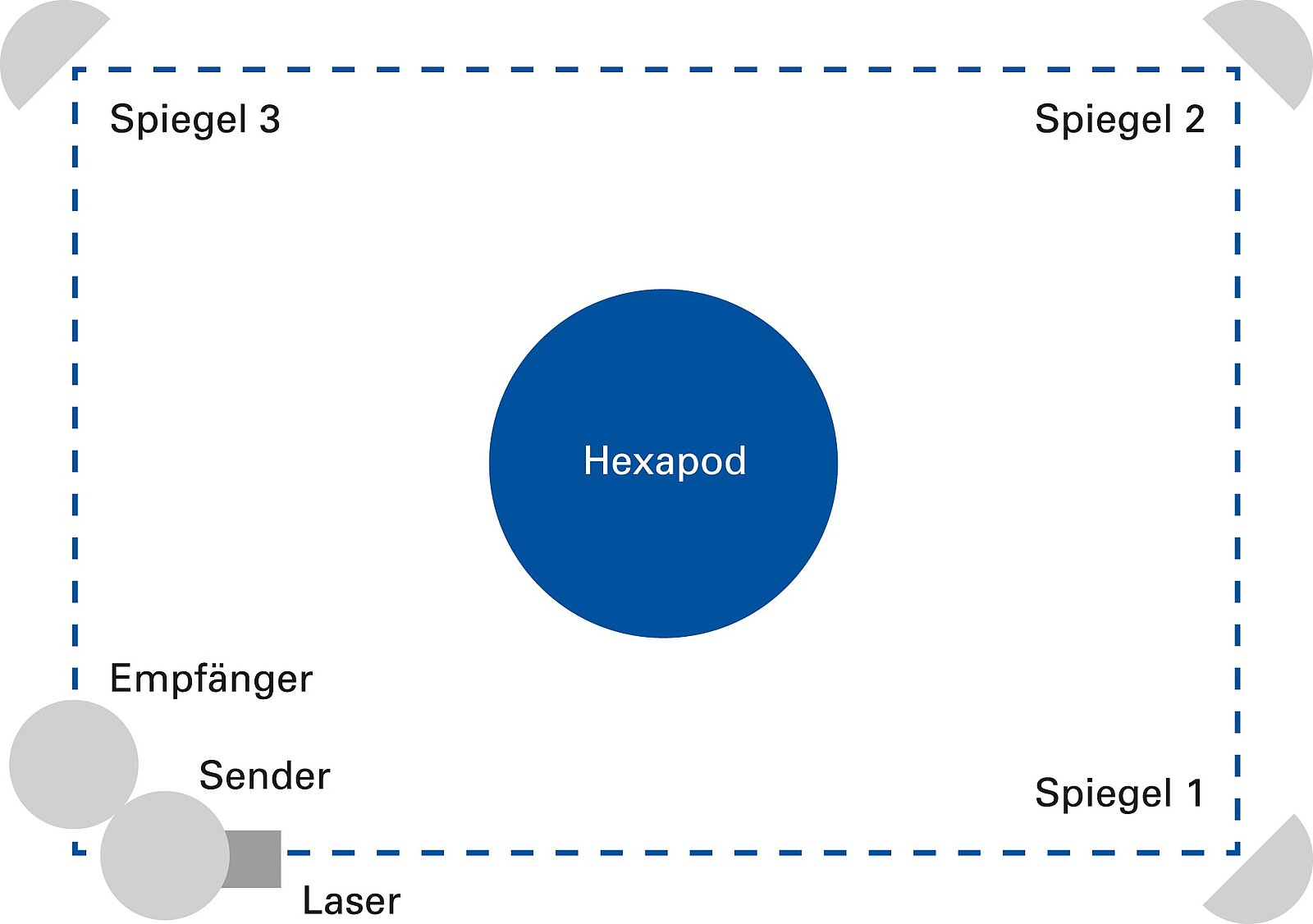
Based on the underlying parameters and assumptions, the mechanical setup, as shown in the picture below, was implemented. This implementation of the safety function was written in the Python programming language as an example. However, it is always possible to choose a different software solution or to use a PLC to connect the hexapod, for example, via EtherCAT®.

You can find further information on the integration into the electronics, the components from PILZ and PI used, and on the implementation of the safety function in the white paper:

White paper
Industrial Safety Device for Hexapods
How to Connect a Safety Light Barrier to a Hexapod System


