PI, nel design del proprio software di motion control, persegue un concetto di piattaforma e di indipendenza dall'hardware. Questo approccio ha confermato la propria validità e anche la flessibilità per futuri miglioramenti.

Il GCS garantisce la compatibilità tra i sistemi di posizionamento PI attraverso set di comandi standardizzati e leggibili dall'uomo. Pertanto, la messa in funzione e la programmazione diventano molto più semplici: È possibile far funzionare insieme diversi sistemi di posizionamento e integrare nuovi sistemi con un minimo sforzo di programmazione.
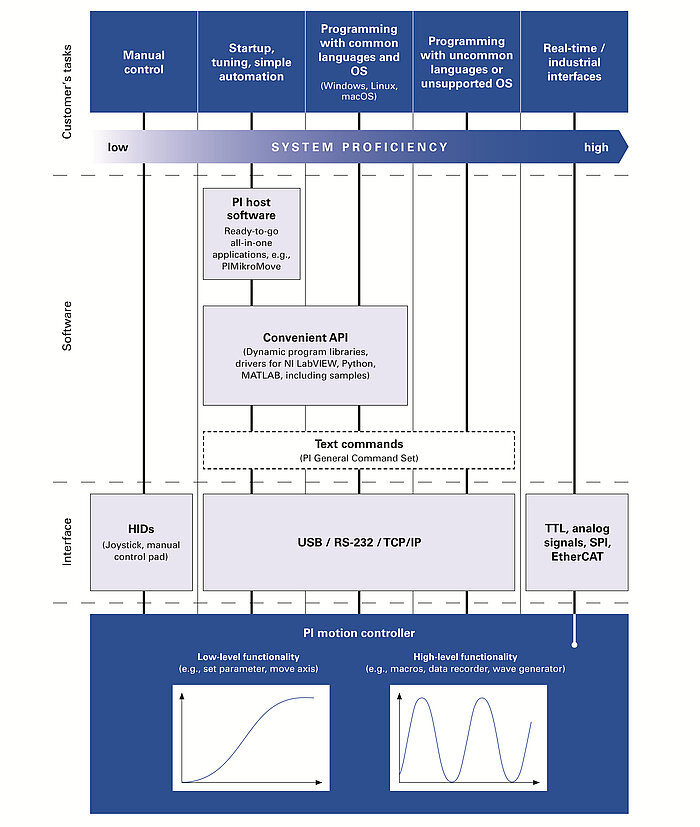
Esistono diversi modi per pilotare i controllori PI:
- I comandi possono essere ricevuti via USB, RS-232 o TCP/IP, a seconda delle specifiche del controllore
- >> APIs con diverse librerie e driver possono essere utilizzati per i processi di automazione e integrazione
- >> Il PIMikroMove® offre un'interfaccia utente grafica per il controllo dei nostri controllori; i comandi GCS vengono inviati in background
- È possibile comunicare da altri ambienti, inviando comandi basati su testo con implementazioni definite dall'utente
Ulteriori opzioni di controllo:
- Collegamento diretto con un dispositivo di interfaccia umana (HID), come un joystick o un control pad
- Interfacce di controllo aggiuntive, ad esempio segnali analogici, interfaccia periferica seriale (SPI), TTL o EtherCAT